Il concetto dietro la comunicazione tattile è abbastanza semplice, tuttavia la scienza che la rende possibile è molto più complicata. Il processo di base prevede la simulazione di un senso del tatto o del contatto tattile utilizzando delle vibrazioni o la pressione dell’aria . Le difficoltà nel fare funzionare la tecnologia tattile sta nel controllare la quantità di stimolazione in modo che da imitare la pressione esercitata sul corpo quando si sta toccando un oggetto reale. La tecnologia ha usi diversi come la realtà virtuale, i display elettronici tattili usati dai non vedenti, per rintracciare i rilievi sui portatili che rispondono aal tocco e anche le vibrazioni sincronizzate sul controller dei moderni videogiochi che aiutano ulteriormente a immergere il giocatore nel gioco.
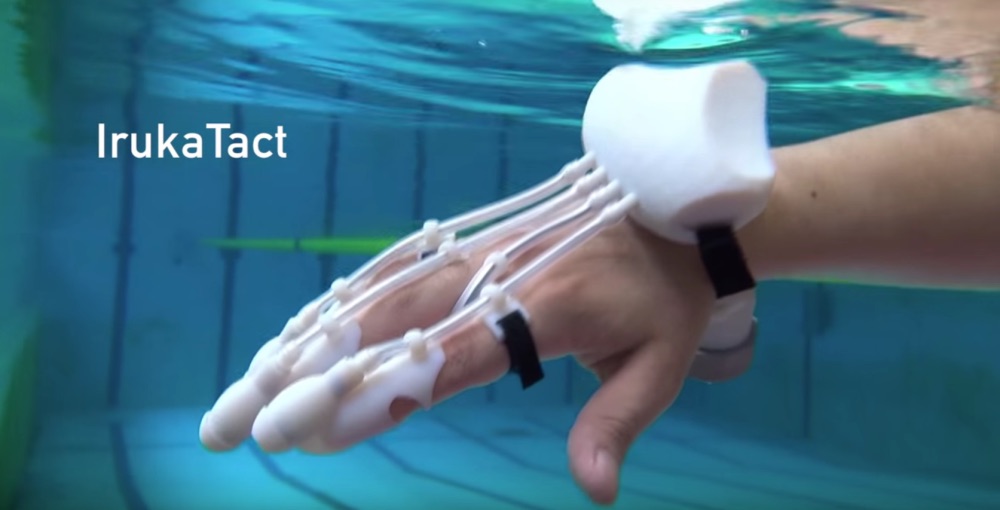
Carolina Chacin e Takeshi Oozu, un paio di dottorandi del programma Empowerment Informatica all’Universita ‘di Tsukuba in Giappone, hanno sviluppato un guanto sonar tattile che permetterà a chi lo indossa di sentire gli oggetti sott’acqua che sono appena fuori dalla loro portata. La IrukaTact (‘Iruka’ significa ‘delfino’ in giapponese) come è stato chiamato il guanto, utilizza l’ecolocalizzazione per rilevare questi oggetti sott’acqua con pulsare micro-getti d’acqua che generano feedback tattile alla persona che lo indossa. Il disegno aspira l’acqua dalla sua area circostante e dirige i getti d’acqua sulle dita di chi la indossa. Getti d’acqua aumentano in forza avvicinandosi all’oggetto, e si indeboliscono se il guanto si allontana dall’oggetto.
“La ricerca del guanto IrukaTact è un kit per aiutare nelle inondazioni un sistema opensource con il potenziale per aiutare le persone in situazioni di emergenza. E ‘stato inizialmente concepito come un nuovo approccio per ampliare le sensazioni aptiche utilizzando la viscosità di ambienti acquosi per fornire più ritorno di forza che in aria, consumando meno energia “, ha spiegato Chacin. “Questa sonda ad ultrasuoni converte i dati del range di feedback tattile imitando il metodo del sonar di ecolocalizzazione usata da delfini (Iruka) per percepire l’ambiente circostante con visibilità limitata. Si estende il senso del tatto per sentire la topografia di un pavimento sommerso in parallelo alla mano di chi la indossa, al fine di percepire oggetti in acque torbide dove la vista non è più utile. Questo progetto è stato sviluppato con la guida di FutureLab di Ars Electronica per esporlo come un toolkit assistive al Festival post-City 2015 “.
IrukaTact utilizza un dispositivo ad ultrasuoni avanzato chiamato MaxBotix MB7066 che utilizza una Arduino Pro Mini per dirigere i getti di acqua attentamente controllati. I motori sono memorizzati all’interno della mano in silicone che si portano sul dito indice, suldito medio e sull’anulare, lasciando il pollice e il mignolo liberi di ridurre il consumo energetico e di massa. I cavi di controllo che collegano il sensore sonar MaxBotix si trovano sotto il palmo della mano e del polso e i piccoli motori sulle dita sono tutti racchiusi entro tubetti a tenuta stagna. Poiché il guanto ha solo una quantità minima di massa , l’utilizzatore può facilmente afferrare oggetti una volta che sono stati localizzati.
Attualmente l’ IrukaTact può percepire oggetti a circa 60 70 cm di distanza quando è sott’acqua, però Chacin e Oozu sono fiduciosi di poter estendere la portata. Mentre il guanto è principalmente uno strumento di ricerca che viene utilizzato per migliorare la qualità della tecnologia tattile, ci sono evidenti modi di utilizzarlo nel mondo reale . I Subacquei potrebbero potenzialmente utilizzare i guanti per la ricerca di oggetti sul fondo dell’oceano in condizioni di scarsa luminosità e le squadre di soccorso li potrebbero utilizzare per la ricerca di sopravvissuti in condizioni di piena. E naturalmente un guanto simile dotato di giroscopi e accelerometri potrebbe facilmente essere accoppiato con un dispositivo VR come l’Oculus Rift per fornire convincenti feedback di gioco.
“Il nostro obiettivo è stato quello di espandere la capacità tattile. Come si possono sentire le diverse texture o la profondità senza toccare l’oggetto ? La risposta a questa domanda è il puntonodale della nostra ricerca “, ha spiegato Chacin.
Chacin e Oozu hanno collaborato con Ars Electronica per rendere i file stampabili in 3D e per pubblicare le istruzioni di costruzione per il guanto IrukaTact disponibile per il download dal sito TinkerCad. Avendo accesso a una stampante 3D e con l’acquisto di un sensore sonar, un microcontrollor e dei piccoli servomotori chiunque può potenzialmente costruire il proprio guanto d’acqua a comunicazione tattile. Non solo per incoraggiare l’ulteriore sviluppo del guanto, ma sperando che possa trovare impiego in scenari pratici.
trovate i file a questo indirizzo : https://www.tinkercad.com/things/kBM7ebBBaUN


