Robot monta mobili IKEA usando fotocamere 3D, pinze e sensori di forza
La meraviglia di IKEA ci ha portato molte novità nel corso degli anni: showroom splendidamente decorati, gustose polpette svedesi e mobili per la maggior parte facili da costruire che, se non stampati in sé stessi, possono almeno essere potenziati con la tecnologia. Ma non tutti pensano che l’arredamento del marchio sia semplice da assemblare, motivo per cui saranno felici di sapere che ora c’è un robot che si prenderà cura di esso.
Dopo tre anni di ricerca, che sono stati sostenuta da sovvenzioni dal Ministero della Pubblica Istruzione di Singapore , l’ Alliance Singapore-MIT per la ricerca e la tecnologia (SMART), e NTUitive , l’innovazione e impresa braccio di Nanyang Tecnologia dell’Università(NTU), un team di ricercatori dalla Scuola di Ingegneria Meccanica e Aerospaziale dell’università hanno sviluppato un robot autonomo per il montaggio di mobili composto da due bracci robotici con pinze e una fotocamera 3D.
Il mese scorso, il team NTU, composto dal Dr. Francisco Suárez-Ruiz , dall’università Xian Zhou e dall’assistente Quang-Cuong Pham, ha pubblicato un articolo nel giornale Science Robotics sui risultati del suo robot, intitolato “I robot possono assemblare un Sedia IKEA? “
“Per un robot, mettere insieme una sedia IKEA con una tale precisione è più complesso di quanto sembri. Il compito dell’assemblaggio, che può venire naturalmente all’uomo, deve essere suddiviso in diverse fasi, come identificare dove sono le diverse parti della sedia, la forza richiesta per afferrare le parti e assicurarsi che le braccia robotiche si muovano senza scontrarsi in ciascuna altro. Attraverso notevoli sforzi ingegneristici, abbiamo sviluppato algoritmi che consentiranno al robot di prendere le misure necessarie per assemblare la sedia da sola “, ha spiegato il professor Pham.
“Stiamo cercando di integrare più intelligenza artificiale in questo approccio per rendere il robot più autonomo, in modo che possa imparare le diverse fasi di assemblaggio di una sedia attraverso la dimostrazione umana o leggendo il manuale di istruzioni, o persino da un’immagine del prodotto assemblato”.
In soli 8 minuti e 55 secondi, il robot, realizzato con componenti acquistati dallo scaffale, è stato in grado di assemblare una delle classiche sedie Stefan di IKEA, realizzate in pino laccato; questo includeva la ricerca di tutte le parti e la pianificazione indipendente dei suoi percorsi di movimento. Quindi, come ha fatto il team NTU a costruire un robot in grado di svolgere un compito così odioso che alcune coppie considerano anche il divorzio in seguito?
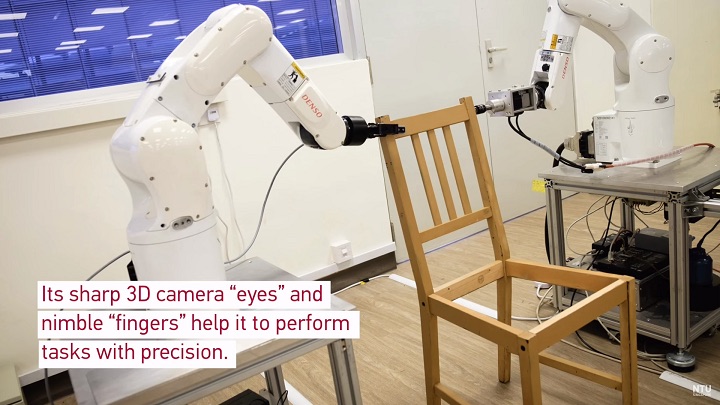
Il robot è stato progettato specificamente per imitare il “hardware” di persone utilizzato per mettere insieme le cose – i bracci sono industriale, a sei assi di movimento quelli robotici, con due pinze parallele per raccogliere oggetti e due polsi con sensori di forza, in modo che il robot sa quanto è forte stringere qualcosa e spingerlo a contatto con un altro oggetto. Gli occhi sono una telecamera 3D dettagliata, che è stata utilizzata in passato per aiutare a portare le funzionalità di livello successivo nel mondo virtuale del gioco , catturare edifici e manufatti storicamente significativi e persino aiutare in chirurgia .
Innanzitutto, il robot scatta foto 3D delle parti distribuite, al fine di elaborare rapidamente una mappa affidabile delle loro posizioni stimate sul terreno. Secondo NTU, questo aiuta a replicare “l’ambiente disordinato dopo gli umani che si uniscono e prepararsi a mettere insieme una sedia da costruire”.
Gli algoritmi di codifica di tre librerie open source, progettate dal team, aiutano il robot a pianificare un movimento rapido e privo di collisioni con entrambe le “mani”, che è anche integrato sia con la percezione tattile che visiva. La quantità di forza usata dai bracci robotici per afferrare pezzi ed eseguire compiti semplici, come l’inserimento di quei piccoli tappi di legno, deve essere regolata. Come ha spiegato il professor Pham, questo è difficile da fare perché i robot industriali sono più bravi nel posizionamento preciso rispetto alla regolazione della forza.
I sensori di forza sui polsi del robot aiutano il robot a prelevare i pezzi in modo coerente e preciso, oltre a far scorrere i tappi lungo la superficie per trovare i fori e quindi inserirli.
Mentre il pensiero di un robot che costruisce i miei mobili è certamente attraente, il suo scopo più grande è molto più importante. Viene utilizzato per studiare ed esplorare un’area di robotica conosciuta come manipolazione abile, che ha bisogno di un controllo preciso della forza e assomiglia agli umani nella sua manipolazione degli oggetti, in quanto ha in realtà mani e dita robotiche speciali.
Il professor Pham ha detto che fino a questo punto, la dimostrazione autonoma di una manipolazione abile è stata usata solo su più “compiti elementari”.
“Una ragione potrebbe essere che compiti di manipolazione complessi in ambienti umani richiedono molte abilità diverse”, ha spiegato il professor Pham. “Questo include la possibilità di mappare le posizioni esatte degli oggetti, pianificare un percorso di movimento senza collisioni e controllare la quantità di forza richiesta. Oltre a queste abilità, devi essere in grado di gestire le loro complesse interazioni tra il robot e l’ambiente.
“Il modo in cui abbiamo costruito il nostro robot, dalle pinze parallele ai sensori di forza sui polsi, tutti lavorano verso la manipolazione degli oggetti in un modo che gli esseri umani farebbero”.
I ricercatori credono che la loro NTU robot autonomo potrebbe, come l’università ha messo, “essere di più grande valore” quando viene utilizzato per eseguire compiti precisi in settori che non richiedono macchinari specializzati o catene di montaggio, anche se la robotica sta facendo il segno lì pure .
Ora che hanno raggiunto l’obiettivo di dimostrare la capacità del robot di costruire una sedia IKEA, il team sta collaborando con varie aziende per applicare questo tipo di manipolazione a più industrie. Ad esempio, stanno attualmente lavorando per preparare il robot per l’incollaggio del vetro – utile nelle applicazioni automobilistiche – e praticare fori nei componenti metallici degli aerei.


