Un team di ricercatori con sede all’Università di Scienza e Tecnologia della Cina (USTC) ha sviluppato alcuni robot unici dotati di bracci morbidi azionati da fili in lega a memoria di forma; anche questi robot sono attinomorfi.
Ci sono tutti i tipi di applicazioni per la robotica morbida combinate con la stampa 3D , dal rendere più sicuro il pavimento della fabbrica e aiutare le persone a sperimentare il feedback tattile in un ambiente VR per creare protesi e robot migliori in grado di navigare attraverso spazi ristretti e su terreni accidentati . Nei loro esperimenti, il team USTC si è concentrato sull’idea di locomozione per i loro robot actinomorfi. Recentemente hanno pubblicato un articolo, dal titolo ” Analisi della locomozione e ottimizzazione di robot attinomorfi con bracci morbidi azionati da fili in lega a memoria di forma “, nell’International Journal of Advanced Robotic Systems .
 L’abstract dice: “Questo articolo presenta l’analisi della locomozione e l’ottimizzazione dei robot soft actinomorphic, che sono composti da bracci morbidi azionati da fili in lega a memoria di forma. Il braccio morbido che è una struttura modulare composita è azionato da una strategia di controllo di feedback auto-sensing. È stato stabilito un modello teorico per descrivere la deformazione del braccio morbido, combinando il modello di fascio di Eulero-Bernoulli del braccio morbido con il modello costitutivo e il modello di trasferimento di calore del filo di lega a memoria di forma. La cinematica del robot morbido actinomorfico è stata analizzata utilizzando il metodo Denavit-Hartenberg modificato e l’equazione del moto del robot morbido actinomorfico è stata presentata sulla base dell’ipotesi quasi-statica. I risultati mostrano che il robot morbido actinomorfico si muove con un modello a zig-zag. La locomozione di quattro robot soft actinomorfi con tre o sei braccia è stata analizzata e i parametri dell’andatura di ciascun tipo di locomozione sono stati ottimizzati. I risultati di ottimizzazione indicano che il robot actinomorfo a tre bracci con determinati parametri di andatura ha le migliori prestazioni e raggiunge una lunghezza massima della falcata di 75 mm. Una serie di esperimenti sono stati condotti per studiare le prestazioni del movimento del robot actinomorfo a tre bracci in vari ambienti. ”
L’abstract dice: “Questo articolo presenta l’analisi della locomozione e l’ottimizzazione dei robot soft actinomorphic, che sono composti da bracci morbidi azionati da fili in lega a memoria di forma. Il braccio morbido che è una struttura modulare composita è azionato da una strategia di controllo di feedback auto-sensing. È stato stabilito un modello teorico per descrivere la deformazione del braccio morbido, combinando il modello di fascio di Eulero-Bernoulli del braccio morbido con il modello costitutivo e il modello di trasferimento di calore del filo di lega a memoria di forma. La cinematica del robot morbido actinomorfico è stata analizzata utilizzando il metodo Denavit-Hartenberg modificato e l’equazione del moto del robot morbido actinomorfico è stata presentata sulla base dell’ipotesi quasi-statica. I risultati mostrano che il robot morbido actinomorfico si muove con un modello a zig-zag. La locomozione di quattro robot soft actinomorfi con tre o sei braccia è stata analizzata e i parametri dell’andatura di ciascun tipo di locomozione sono stati ottimizzati. I risultati di ottimizzazione indicano che il robot actinomorfo a tre bracci con determinati parametri di andatura ha le migliori prestazioni e raggiunge una lunghezza massima della falcata di 75 mm. Una serie di esperimenti sono stati condotti per studiare le prestazioni del movimento del robot actinomorfo a tre bracci in vari ambienti. ”
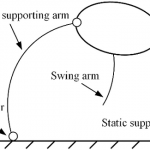
Schema di un meccanismo parallelo a catena chiusa equivalente per un robot morbido actinomorfico.
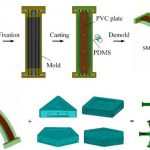
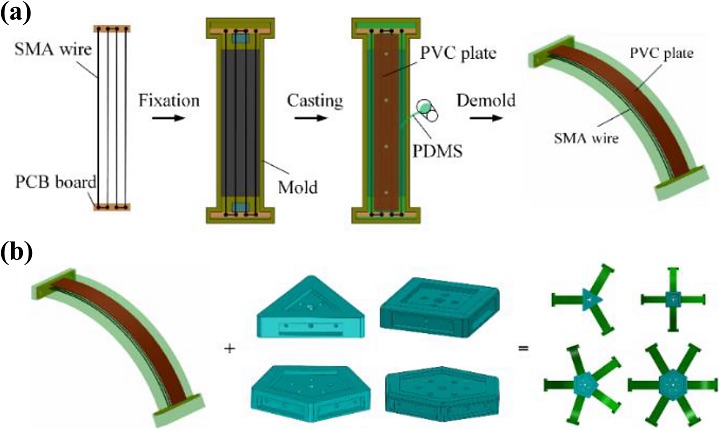
I robot morbidi, con da tre a sei braccia, non erano interamente stampati in 3D. Ma gli scaffali poligonali, che erano combinati con le braccia morbide per costituire ciascun robot actinomorfo, erano stampati in 3D in ABS. I bracci morbidi sono stati fabbricati utilizzando una tecnica di stampaggio, insieme a una tecnica di stratificazione, ei corpi, azionati da fili SMA, sono stati realizzati con PDMS; anche una piastra polimerica di polivinilcloruro (PVC) incorporata era all’interno del PDMS.
Secondo la carta, “fili SMA multipli possono essere collegati in un sistema parallelo o seriale. Potrebbe aumentare le capacità di forza dell’attuatore SMA per collegare i fili SMA meccanicamente in parallelo. Tuttavia, il requisito di alimentazione può essere influenzato da tale disposizione. Inoltre, questa disposizione ha un effetto negativo sul movimento del robot morbido actinomorfico per i fili all’estremità dell’attuatore. Pertanto, i fili SMA sono stati disposti in layout a forma di M con una modalità seriale. ”
Ogni braccio del robot morbido presenta uno stato di oscillazione, in cui il braccio è sollevato da terra e uno stato di supporto, in cui il braccio è statico o in movimento, a seconda della forza di attrito con il terreno. Il robot morbido actinomorfico può spostarsi grazie a una serie di questi stati di braccio alimentati dai fili di memoria di forma.
I ricercatori hanno creato un meccanismo parallelo equivalente a catena chiusa per analizzare la locomozione dei robot, e hanno eseguito una serie di esperimenti con i piccoli robot morbidi che si muovevano attraverso una varietà di ambienti.
“Il terreno, il braccio di supporto e il rack di stampa 3D con il braccio oscillante corrispondono rispettivamente al telaio, al collegamento e all’effettore finale del meccanismo a catena chiusa”, si legge sulla carta. “Il collegamento tra il braccio di supporto e il rack di stampa 3D è approssimativo a una coppia di rivoluzione. I collegamenti tra il terreno e il braccio di supporto statico o mobile sono rispettivamente la coppia revoluta e la coppia cilindrica e piana. ”
Il lavoro futuro su questi robot soft actinomorfici includerà aumentando la loro mobilità e autonomia. I robot soft sono un modo completamente nuovo di pensare alla robotica. In un mondo robotico, i robot possono diventare più efficienti, meno costosi, più specializzati e più semplici dei robot tradizionali. Questi robot specializzati e semplici sono ora nella loro infanzia che ondeggiano attraverso la sabbia nei laboratori. Nei prossimi anni li vedremo emergere e inizieranno a recitare ruoli nel mondo reale.
Gli autori del documento includono Chunshan Liu, Erbao Dong, Min Xu, Gursel Alici, con l’ Università di Wollongong e Jie Yang.