Le procedure chirurgiche intraluminali sono quelle che si svolgono all’interno delle pareti di un organo, in particolare quelle tubolari. In un documento intitolato ” Ottimizzazione della progettazione congiunta a rotazione per robot chirurgici simili a serpenti tendinei “, un gruppo di ricercatori discute di come hanno usato la stampa 3D per ottimizzare il design di un robot simile a un serpente da utilizzare negli interventi chirurgici intraluminali.
 I robot simili a serpenti presentano numerosi vantaggi nelle procedure chirurgiche. Hanno una forma lunga e stretta che consente loro di raggiungere spazi ristretti e profonde ferite e hanno corpi flessibili che possono seguire percorsi naturali all’interno del corpo umano. Richiedono anche meno incisioni o addirittura nessuna incisione. I robot chirurgici del serpente dovrebbero avere diverse caratteristiche importanti, secondo i ricercatori. Dovrebbero avere un corpo stretto in grado di navigare attraverso piccole incisioni o orifizi naturali e dovrebbero avere una “locomozione che è soggetta ai vincoli anatomici locali, ad esempio, il percorso che segue e naviga all’interno di un volume di lavoro prescritto”.
I robot simili a serpenti presentano numerosi vantaggi nelle procedure chirurgiche. Hanno una forma lunga e stretta che consente loro di raggiungere spazi ristretti e profonde ferite e hanno corpi flessibili che possono seguire percorsi naturali all’interno del corpo umano. Richiedono anche meno incisioni o addirittura nessuna incisione. I robot chirurgici del serpente dovrebbero avere diverse caratteristiche importanti, secondo i ricercatori. Dovrebbero avere un corpo stretto in grado di navigare attraverso piccole incisioni o orifizi naturali e dovrebbero avere una “locomozione che è soggetta ai vincoli anatomici locali, ad esempio, il percorso che segue e naviga all’interno di un volume di lavoro prescritto”.
Questi robot dovrebbero anche essere dotati di visione ad alta fedeltà o stereovisione e illuminazione. Dovrebbero avere più canali interni e avere strumenti intercambiabili per afferrare, cauterizzare, ecc. Dovrebbero avere una forza sufficiente per la manipolazione dei tessuti e caratteristiche come un canale di irrigazione di aspirazione e il rilevamento e l’imaging integrati. Idealmente, dovrebbero anche essere specifici del paziente per un adattamento personalizzato alle anatomie non comuni.
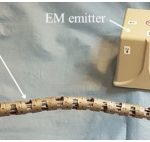
Nel documento, i ricercatori descrivono come hanno progettato un nuovo robot multi-tool simile a un serpente, chiamato i2 Snake (Intuitive Imaging Sensing Navigated e Kinematically Enhanced robot) per la chirurgia mini-invasiva. Sono andati con un’architettura tendine-guidata con collegamenti seriali per assicurarsi che il dispositivo potesse includere spazio per più strumenti e “forze sufficientemente elevate per manipolare il tessuto in massa”. In particolare, hanno usato un design a giunto rotante, una bio -piatto ispirato che consiste in due superfici circolari che rotolano l’una contro l’altra. Questo tipo di articolazione può essere trovato in molte specie, compresi gli esseri umani, in parti come il ginocchio e le falangi.
I giunti rotanti standard presentano un inconveniente: possono scivolare, causando inesattezze di controllo o giunzioni slogate. Esistono tre diversi tipi di scivolamento che possono verificarsi: uno scivolamento laterale, in cui la parte rotante superiore rotola troppo lontano e scivola via dalla parte inferiore; uno slittamento longitudinale, che si verifica quando vengono esercitate forze laterali esterne; e una scivolata ondulata, dove le due superfici scivolano l’una contro l’altra.
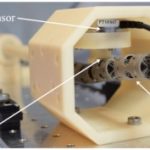
“Per superare questi limiti, è stata proposta una nuova progettazione bilaterale sincrona a giunti rotanti”, affermano i ricercatori. “La soluzione consiste nell’utilizzare un ingranaggio cilindrico inserito tra due superfici di rotolamento combinate con quattro tendini. L’ingranaggio cilindrico può superare sia lo slittamento longitudinale che il rolling-slip mentre i quattro tendini, oltre all’ingranaggio, possono impedire lo slittamento laterale. ”
I ricercatori hanno utilizzato una stampante 3D Mlab di Concept Laser per realizzare un prototipo del giunto rotante ottimizzato. Il giunto è stato quindi caratterizzato in termini di precisione e forze di manipolazione.
“I risultati mostrano forze di manipolazione fino a 5,6 N, ma dovranno essere ulteriormente caratterizzati in uno scenario clinico con una guaina esterna e strumenti in esecuzione all’interno del robot”, concludono i ricercatori. “Il lavoro futuro esaminerà il controllo non lineare per compensazione del gioco e dell’allungamento nel contesto della navigazione autonoma. Strumenti chirurgici flessibili e intercambiabili saranno integrati e testati durante le attività chirurgiche ex-vivo e, infine, in vivo. ”
Oltre al giunto rotante, il progetto del robot consisteva anche in “un corrispondente algoritmo di ottimizzazione che considera anche le collisioni e un’architettura del midollo spinale con tendine al centro del robot per ridurre il cross-talk tendineo”.
Gli autori del documento includono Pierre Berthet-Rayne, Konrad Leibrandt, Kiyoung Kim, Carlo A. Seneci, Jianzhong Shang e Guang-Zhong Yang.