RICERCATORI UNIVERSITARI CINESI E GIAPPONESI STAMPA 3D DITO ROBOTICO MORBIDO
Una coalizione di ricercatori della Zhejiang University of Technology , Tianjin University , Nanjing Institute of Technology e Ritsumeikan University , hanno utilizzato la stampa 3D per creare un dito di robotica leggera.
Alimentato da un sensore di curvatura triboelettrico a singolo elettrodo incorporato (S-TECS), la cifra additiva può rilevare la curvatura di flessione a frequenze di lavoro ultra basse, senza richiedere una fonte di alimentazione esterna. Il dispositivo è stato prodotto come prova del concetto secondo cui la stampa 3D multi-materiale può essere utilizzata non solo per fabbricare attuatori morbidi, ma anche sensori funzionali. I ricercatori sperano che l’innovazione spianerà la strada a un processo di produzione semplice e veloce per produrre robotica controllata controllabile.
La robotica costruita utilizzando una miscela di materiali morbidi e strutture conformi fornisce sempre più soluzioni alle sfide causate dall’invecchiamento della popolazione. Con l’avanzare della ricerca sulla robotica leggera e lo sviluppo di nuovi metodi di produzione, le interazioni uomo-robot stanno diventando più sicure e aprono nuove applicazioni per la tecnologia. Ad esempio, è ora possibile stampare direttamente robot morbidi con una struttura complessa a tenuta d’aria e componenti duri. Questo sviluppo ha portato a innovazioni come il robot da salto stampato in 3D del Wyss Institute prodotto nel 2015.
Altri progetti di robotica leggera, come quello del team Wyss, hanno integrato sensori ottici basati su materiali ottici piezoelettrici, conduttivi, magnetici e organici nei loro progetti di robotica leggera. Secondo i ricercatori, tuttavia, questi sensori possono presentare inconvenienti come tempi di prototipazione lunghi, connessione del cavo instabile, assemblaggio del sistema complicato e difficoltà di integrazione del sistema.
Di conseguenza, il team di ricerca ha deciso di utilizzare sensori triboelettrici. Questo tipo di componente offre elevata elasticità e sensibilità, consentendo al dito robotizzato di percepire e percepire attivamente la sua deformazione o risposta in tempo reale. L’uso della stampa 3D all’interno del processo ha inoltre consentito al team di utilizzare più materiali e di sfruttare un processo di stampa in una fase con tempi di prototipazione ridotti. Costruito attraverso la combinazione di un sensore di curvatura triboelettrico e un elettrodo estensibile, il sensore S-TECS dei ricercatori è riuscito a evitare la stessa complessità di integrazione dei progetti precedenti.
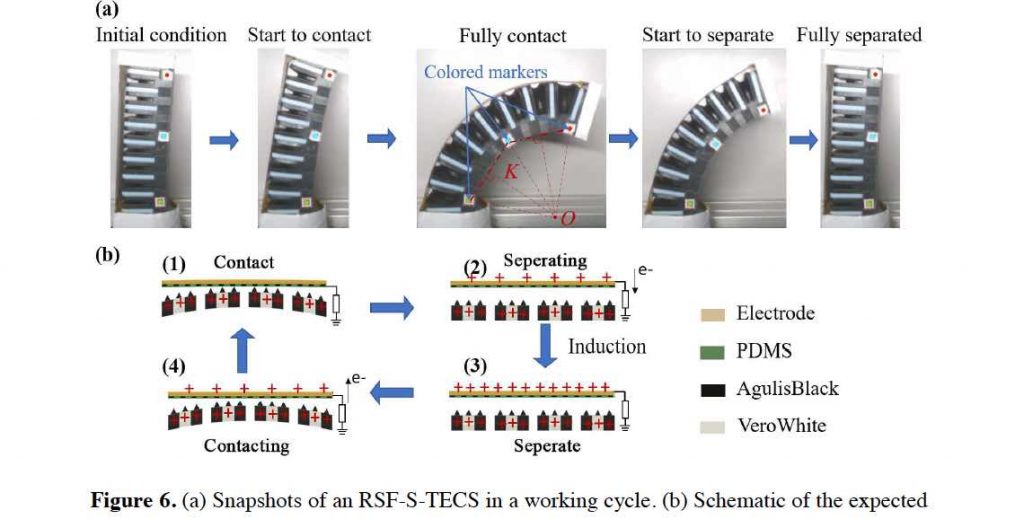
Il corpo principale del dispositivo è costituito da nove camere di gonfiaggio collegate a una via aerea principale, con ogni camera caratterizzata da una forma rettangolare per fornire una superficie piana su cui stampare i motivi S-TECS. Le camere a rinforzo duro hanno una larghezza di 2 mm, con due distanziali su entrambe le estremità per sostenere lo strato superiore di S-TECS e mantenere un’altezza di 3 mm tra i due strati. La cifra additiva può piegarsi solo in una direzione in base alla sua configurazione della camera. Quando il dito si piega, lo strato superiore dell’S-TECS inizia ad avvicinarsi allo strato inferiore, fino a quando non raggiunge il pieno contatto, attivando l’elettrificazione dei contatti e generando elettricità.
Il dispositivo è stato prodotto utilizzando una stampante 3D Objet350 multimateriale Stratasys in due parti separate: il corpo principale morbido rinforzato e il connettore. I motivi di S-TECS sono stati stampati direttamente sulla superficie superiore del corpo del dito per semplificare il processo di fabbricazione totale e ridurre i tempi di produzione. Lo strato triboelettrico e il corpo morbido del dispositivo sono stati prodotti utilizzando il materiale di stampa Agilus Black simile alla gomma, poiché ha dimostrato una resistenza alla trazione di 2,75 MPa e un allungamento a rottura del 250%. L’indurimento è stato effettuato a temperatura ambiente per 24 ore e una volta avvitate insieme le parti stampate in 3D del dito e l’S-TECS attaccato con adesivo siliconico, il montaggio è stato completato.
I ricercatori hanno testato le prestazioni del sensore in diverse condizioni modificando la configurazione della superficie, le forze applicate ad esso e le frequenze operative in una configurazione automatizzata. Non è stato riscontrato che l’integrazione del sensore con diversi materiali morbidi riduca la flessibilità e l’adattabilità dell’intero sistema robotico. Inoltre, i sensori si sono dimostrati in grado di misurare una curvatura delle dita fino a 8,2 m-1 con una frequenza di lavoro ultra bassa di 0,06 Hz.
I test non solo hanno dimostrato l’efficacia dell’S-TECS come sensore di curvatura autoalimentato, ma anche la fattibilità della creazione di strutture robotiche morbide con strati triboelettrici utilizzando la tecnologia di stampa 3D multi-materiale. I ricercatori hanno concluso che il metodo aveva il potenziale per essere utilizzato in future applicazioni di robotica che utilizzano capacità di rilevamento avanzate.
Produzione additiva e robotica leggera
La stampa 3D è stata utilizzata per creare robotica leggera con una vasta gamma di applicazioni che vanno dall’industria aerospaziale a scopi medicinali.
I ricercatori della Cornell University di New York hanno sviluppato un muscolo robotico stampato in 3D in grado di controllare la sua temperatura interna attraverso la traspirazione nel gennaio 2020. I suoi attuatori morbidi simili a dita potevano trattenere l’acqua e rispondere alla temperatura per raffreddarsi.
Una coppia di ricercatori della NASA ha utilizzato con successo la stampa 3D per produrre un attuatore robotizzato a maggio 2019, un componente chiave per l’animazione e il controllo delle parti mobili di un robot. La ricerca faceva parte di un’indagine più ampia su potenziali applicazioni robotiche morbide nello spazio.
I ricercatori della Rutgers University-New Brunswick hanno creato un nuovo materiale di stampa 3D in idrogel a maggio 2018 che era così flessibile da poter essere fatto camminare come un essere umano. Sviluppato per applicazioni nell’industria medica, il materiale potrebbe essere utilizzato per fornire farmaci per colpire parti del corpo, riducendo il rischio di danni a un paziente.
I risultati dei ricercatori sono dettagliati nel loro articolo intitolato ” Un dito robotico morbido con sensore di curvatura triboelettrico autoalimentato basato sulla stampa 3D multi-materiale “. Lo studio è stato pubblicato su Science Direct Journal e co-autore di Mingzhu Zhu, Mengying Xie, Xuanming Lu, Shima Okada e Sadao Kawamura.