Il robot standard (overlord) è solitamente dotato di attuatori rigidi, noti anche come pinze; possono avere un rivestimento morbido per limitare i graffi sulla superficie di qualsiasi oggetto con cui il robot interagisce, ma alla fine gli attuatori devono essere relativamente rigidi per sopportare il peso degli oggetti sollevati. Per applicazioni che coinvolgono oggetti più leggeri e delicati, l’attuatore rigido dovrebbe essere sostituito con un attuatore più morbido e flessibile. Ora un team di ricercatori dell’Università di Tecnologia e Design di Singapore (SUTD) e dell’Università Jiao Tong di Shanghai (SJTU) ha attuatori multi-materiale stampati in 3D con rigidità regolabile che potrebbero eliminare la necessità di sostituire attuatori per compiti diversi.
Il loro attuatore comprende uno strato di un polimero a memoria di forma ad attivazione termica (SMP), che è un materiale che modifica la rigidità a seconda della sua temperatura. I precedenti tentativi di realizzare attuatori con SMP hanno prodotto risposte lente e definizione limitata. Ma il team di ricerca multinazionale ha utilizzato la scrittura a inchiostro diretto e la stampa 3D multimateriale per incorporare elementi di riscaldamento e raffreddamento negli attuatori, creando i primi attuatori morbidi a risposta rapida, regolabili in base alla rigidità (FRST) .
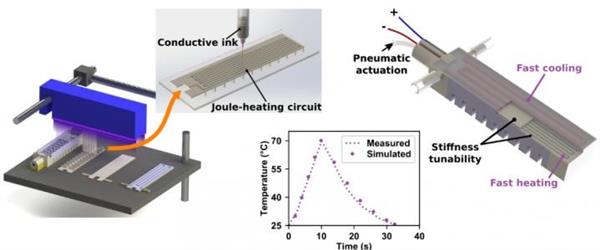
“Combiniamo una tecnologia di stampa 3D multi-materiale commerciale a getto d’inchiostro con l’approccio di scrittura a inchiostro diretto per fabbricare il nostro attuatore FRST completamente stampato”, ha detto l’assistente professore Qi (Kevin) Ge del Science and Math Cluster di SUTD, uno dei co-leader di il progetto. “La modularità della rigidità è fornita da uno strato SMP incorporato e la risposta rapida è abilitata dagli elementi incorporati di riscaldamento e raffreddamento.”
L’elemento riscaldante è un circuito conduttivo deformabile stampato con un inchiostro di nanoparticelle d’argento e un refrigerante spinto attraverso un canale fluidico fornisce il raffreddamento. L’aria pressurizzata scorre anche attraverso l’attuatore per deformarlo nelle posizioni aperta e chiusa quando si trova nello stato gommoso / caldo; la pressione dell’aria può essere rimossa quando l’attuatore è rigido / freddo e l’attuatore manterrà quella forma.
Lo strato SMP rende l’attuatore 120 volte più rigido del materiale di base senza sacrificare la flessibilità e, grazie agli elementi di controllo della temperatura, l’attuatore può passare attraverso un intero ciclo di riscaldamento e raffreddamento (da 25 ° C a 70 ° C e ritorno a 25 ° C) in soli 32 secondi! “L’attuatore deformato nel suo stato rigido può svolgere compiti di carico, anche dopo aver rilasciato l’aria pressurizzata.Un fattore più importante, un ciclo di riscaldamento-raffreddamento può essere completato in circa mezzo minuto, che è il tasso più veloce segnalato, a nostra conoscenza, “professore dichiarato Ge.
Inoltre, il team ha progettato un modello di computer che guida i progetti di attuatori successivi. “Abbiamo anche costruito modelli computazionali per simulare i comportamenti meccanici e termico-elettrici del nostro attuatore FRST”, ha osservato Yuan-Fang Zhang, ricercatore post-dottorato presso SUTD e co-autore del documento. “Una volta convalidati con gli esperimenti, i modelli vengono utilizzati per guidare la progettazione dell’attuatore FRST e fornire approfondimenti sul potenziamento della capacità di carico.”
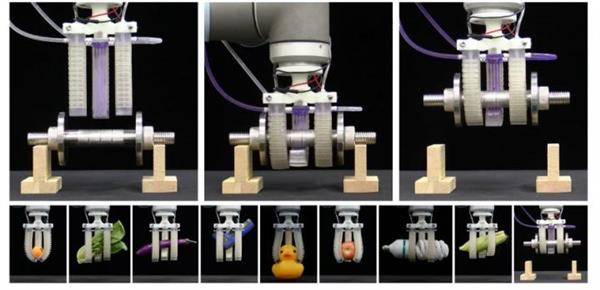
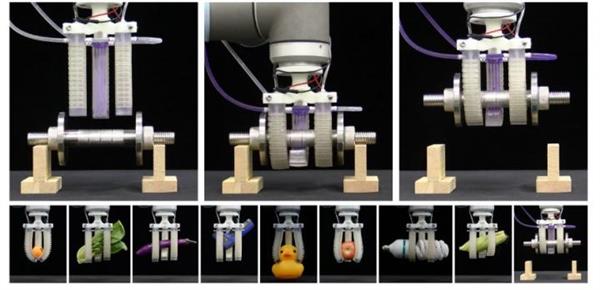
Naturalmente, nessuno studio è completo senza test effettivi, quindi il team ha costruito una mano robotica con tre attuatori FRST e lo ha dimostrato sollevando e afferrando vari oggetti, tra cui una lampadina e un manubrio. Il professor Guoying Gu, un co-leader del progetto di SJTU, ha elaborato: “Per mostrare l’elevata capacità di carico e l’adattabilità del nostro prototipo, abbiamo ideato una pinza robotica con tre attuatori FRST in grado di afferrare e sollevare oggetti con forme arbitrarie e vari pesi che vanno da meno di 10 g fino a 1,5 kg. ” Gli attuatori FRST stampati in 3D ci avvicinano di un passo alla replica della straordinaria destrezza della mano umana, che ha una rigidità dinamica grazie a una sinfonia di cooperazione tra ossa, muscoli, tendini, sangue, grasso e pelle. La mano è una cosa complessa da duplicare, ma con l’aiuto della stampa 3D,
È difficile concepire tutti gli usi di questi attuatori: quasi tutto ciò che si apre e si chiude, sale e scende o cambia posizione; sblocchi di sicurezza, valvole e registri d’aria regolabili; e vari servi che controllano le posizioni dei cancelli. La stampa 3D di una cerniera che può aprirsi e chiudersi senza un motore o servo è la realtà in cui viviamo.