La robotica e la stampa 3D sono andate di pari passo per anni, ma i ricercatori Ryan L. Truby, Robert K. Katzschmann, Jennifer A. Lewis e Daniela Rus hanno dato un tocco molto più letterale a quello nel loro studio, ” Soft Robotic Fingers with with Sensori ionogel integrati e modalità di attuazione discreta per la manipolazione somatosensibile , che delinea le loro ultime innovazioni: pinze che sono altamente funzionali grazie alla loro adattabilità per la presa.
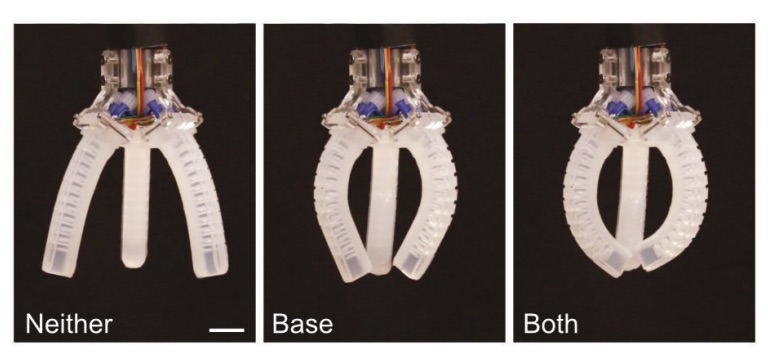
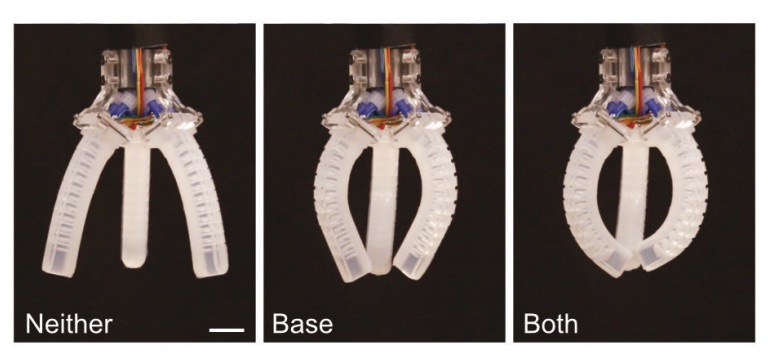
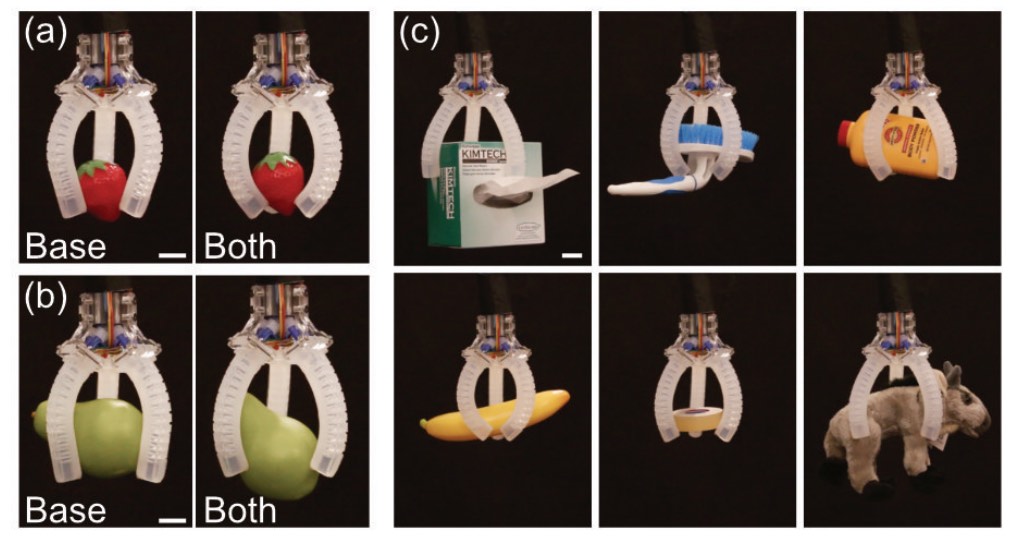
Esempi di pose di manipolatore. Fotografie della pinza morbida durante l’azionamento a sinistra (sinistra), solo base (centrale) e a dito pieno a pressioni di gonfiaggio di 140 kPa. La barra della scala è 15 mm.
I robot rigidi sono ovviamente poco maneggevoli per molte applicazioni. Fino ad ora, tuttavia, è stato ancora difficile progettare e produrre attuatori morbidi con le caratteristiche desiderate, in quanto richiedono un’estrema destrezza nell’azione e un meccanismo di controllo ad anello chiuso. Qui, l’embedding stampato in 3D è la chiave per realizzare morbide pinze robotiche a forma di mani, in grado di mostrarci il futuro di tali dispositivi in applicazioni come:
Assemblaggio automatizzato
Confezione
protesi
Conservazione
Ambienti estremi
“Tuttavia, la creazione di robot morbidi con attuazione a multi-grado di libertà (DOF) e capacità somatosensoriali rimane un ostacolo significativo che limita il loro uso pratico in queste aree”, affermano i ricercatori. “La maggior parte dei manipolatori robotici soft funzionano tramite controllo ad anello aperto e hanno un semplice azionamento a DOF singolo, come piegatura o torsione uniforme.
“Data la semplicità di attuazione fluidica e le tecniche di fabbricazione basate su stampaggio, gli attuatori di elastomeri fluidici (FEA) sono una piattaforma popolare per la produzione di manipolatori morbidi. Sfortunatamente, queste tecniche richiedono più fasi di assemblaggio, specialmente quando si desiderano attuatori multi-DOF. “
La necessità di sensori rende spesso improbabili dispositivi come questo, poiché una maggiore complessità viene aggiunta al design e alla produzione effettiva. Per questo studio, e l’integrazione della manipolazione soft somatosensibile, il team di ricerca ha valutato come rendere attuatori composti da modalità di attuazione discrete e sensori integrati. Fortunatamente, sono stati in grado di passare alla stampa 3D, una tecnologia spesso molto attraente per gli innovatori persistenti che sanno “dove c’è una volontà esiste un modo”.
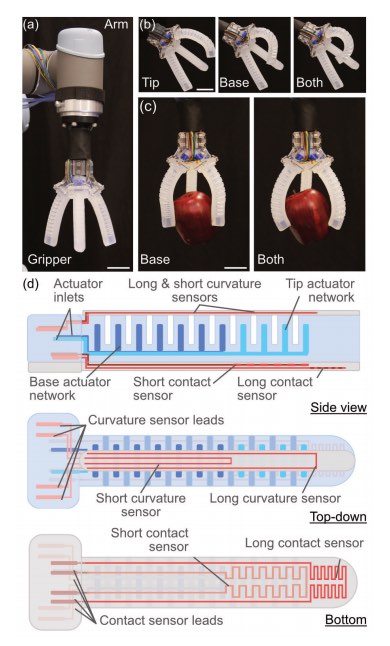
Ogni dito è costituito da due “reti fluidiche” che corrono lungo la punta artificiale, la base e “l’azionamento a dito pieno”. Ci sono una varietà di modi diversi che la mano può afferrare, con quattro diversi sensori che controllano ogni cifra che contiene un ionogel organico per il feedback sensoriale.
“Realizzare robot soft basati su FEA con sensori integrati e attuazione multi-DOF richiede molti passaggi”, affermano i ricercatori. “Il lavoro precedente ha utilizzato tecniche di stampaggio per rendere morbidi quadrupedi, pesci nuotatori, attuatori a tentacolo e manipolatori manuali con diversi DOF.
“Al contrario, la stampa 3D offre un approccio promettente per la progettazione rapida e la fabbricazione di complessi attuatori morbidi. Di recente sono emerse diverse tecniche di stampa a base di inchiostro e luce per la costruzione diretta di dita, gambe, pinze e sistemi robotici integrati a più DOF. “
Le FEA potrebbero funzionare in una capacità rigida o morbida, ma i ricercatori sottolineano che i sensori più tradizionali e meno flessibili non funzionano con gli elastomeri morbidi FEA. Le parti rigide che sono richieste per le guide d’onda elastomeriche non si interfacciano bene neanche. Il team continua inoltre a sottolineare che i sensori di metalli liquidi non sono una buona scelta a causa del “potenziale spostamento dei loro strati di ossido passivante nel tempo”.
Come spesso accade nella creatività umana, nella scienza e nel design 3D, la natura è un’enorme ispirazione. Per questo studio, i ricercatori hanno sfruttato le capacità sensoriali naturali e la destrezza delle mani umane, creando la pinza robotica a tre dita. Ognuno è stato stampato in 3D usando la stampa EMB3D, che consente di creare pattern arbitrari, e qui il design è modulare. La stampa 3D ha richiesto circa 90 minuti, la polimerizzazione durante la notte, e quindi le parti sono state refrigerate per un’ora per liquefare l’inchiostro. Le dita morbide sono state collegate insieme e poi gonfiate con una valvola pneumatica.
“Stiamo ora perseguendo attivamente nuovi progetti di attuatori morbidi multi-DOF e sensorizzati utilizzando questi metodi per creare tipi più complessi di manipolatori robotici abili e morbidi”, hanno concluso i ricercatori. “I modelli di manipolatori morbidi che stiamo esplorando hanno numeri di dita, orientamenti, disegni e motivi di rilevazione diversi rispetto alla pinza presentata qui. Lavorando con algoritmi consolidati per la pianificazione delle operazioni con pinze morbide e riconoscimento degli oggetti, miriamo a sviluppare robot soft con funzionalità di manipolazione avanzate che saranno utili in una miriade di applicazioni. “