Una tesi si concentra sull’utilizzo della stampa 3D cooperativa con robot per migliorare la scalabilità della tecnologia
Ovviamente, le dimensioni della vostra stampa 3D sono limitate dalle dimensioni della vostra stampante 3D … non proverete a stampare in 3D un edificio, non importa quanto piccolo , utilizzando un sistema desktop, giusto? Jace J. McPherson, della University of Arkansas, lo ha messo più esattamente nella tesi di laurea che ha scritto e presentato per la sua laurea in Informatica e Ingegneria Informatica:
“Più specificamente, un oggetto non può essere stampato se è più largo dell’intervallo di movimento orizzontale completo di un ugello di estrusione o se è più alto dell’altezza massima dell’ugello di estrusione sopra la superficie di stampa (cioè il” letto di stampa “). ”
Secondo la tesi di McPherson, intitolata ” A Slicer scalabile e basato su blocchi per la stampa 3D cooperativa ,” le limitazioni di dimensioni dei lavori di stampa possono ostacolare l’obiettivo della tecnologia di essere “completamente dinamici”. Nella tesi, si è concentrato sul problema della scalabilità della stampante 3D – limitata dalla dimensione del letto di stampa e dall’uso di una singola testina di stampa – e dalla mancanza di automazione della produzione, e dall’idea di una stampa 3D cooperativa e una nuova strategia di affettamento per questa tecnologia, come soluzione combinata.
L’abstract afferma: “La stampa 3D cooperativa è una tecnologia emergente che mira ad aumentare la velocità di stampa 3D e a superare il limite di dimensioni dell’oggetto stampabile grazie alla presenza di più stampanti 3D mobili (robot mobili con testina di stampa) in un’unica operazione di stampa su un pavimento di fabbrica. Si differenzia dalla tradizionale stampa 3D strato per strato, poiché richiede che più stampanti mobili funzionino contemporaneamente senza interferire l’una con l’altra. Pertanto, è necessario un nuovo approccio per affettare un modello digitale e generare comandi per le stampanti portatili, che non è stato discusso in letteratura prima. Proponiamo un’affettatrice basata su un chunk che divide un oggetto in blocchi in modo che diverse stampanti portatili possano stampare contemporaneamente diversi blocchi senza interferire l’uno con l’altro. In questo documento, per prima cosa abbiamo sviluppato un affettatrice per la stampa 3D cooperativa con due stampanti FDM (Fused Deposition Modeling) mobili. Per consentire a molte altre stampanti mobili di lavorare insieme, abbiamo quindi sviluppato un framework per il ridimensionamento di molte stampanti portatili con un’elevata efficienza parallela. Per convalidare il nostro slicer per il processo di stampa 3D cooperativo, abbiamo anche sviluppato un ambiente di simulazione, che può essere uno strumento prezioso per visualizzare e ottimizzare una strategia di stampa 3D cooperativa. Questo ambiente di simulazione è stato sviluppato anche per esportare la visualizzazione in un formato generico da utilizzare altrove. ” Per convalidare il nostro slicer per il processo di stampa 3D cooperativo, abbiamo anche sviluppato un ambiente di simulazione, che può essere uno strumento prezioso per visualizzare e ottimizzare una strategia di stampa 3D cooperativa. Questo ambiente di simulazione è stato sviluppato anche per esportare la visualizzazione in un formato generico da utilizzare altrove. ” Per convalidare il nostro slicer per il processo di stampa 3D cooperativo, abbiamo anche sviluppato un ambiente di simulazione, che può essere uno strumento prezioso per visualizzare e ottimizzare una strategia di stampa 3D cooperativa. Questo ambiente di simulazione è stato sviluppato anche per esportare la visualizzazione in un formato generico da utilizzare altrove. “
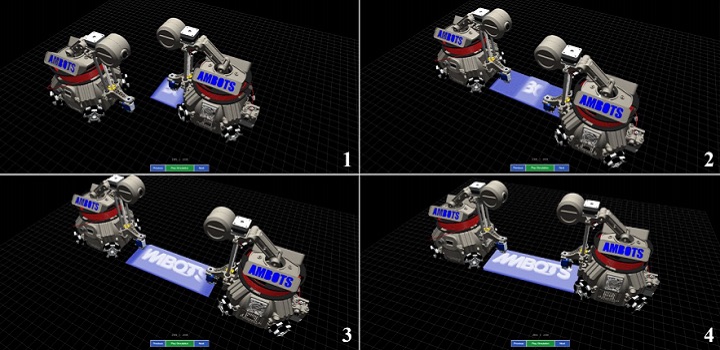
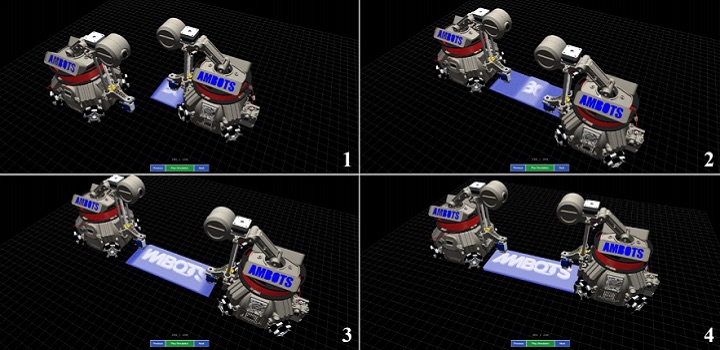
Stampa 3D cooperativa su larga scala. Molti robot collaborano per produrre un singolo oggetto che non richiede il montaggio al completamento. Il prodotto finale in questa figura è una mappa topografica dello stato dell’Arkansas.
La stampa 3D cooperativa è composta da più stampanti 3D robot indipendenti, in roaming gratuito, che ricevono istruzioni su come stampare una parte, o un blocco, di un intero oggetto. Il meccanismo consente di completare autonomamente lavori di stampa di grandi dimensioni, senza interruzioni, in un unico pezzo, senza interazione umana. Le parti sono in realtà stampate in 3D una sopra l’altra in modo da essere unite durante il processo e non dopo.
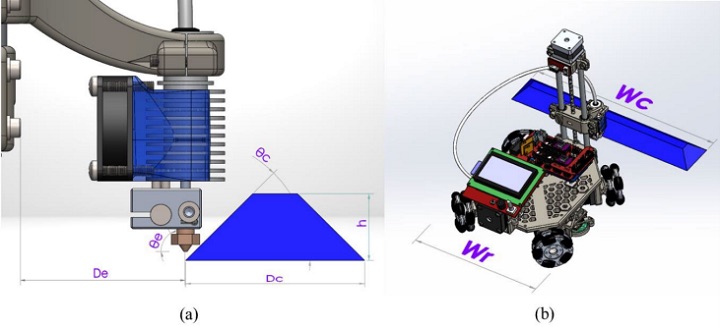
(a) Illustrazione delle dimensioni del blocco e limitazioni di stampa sulla pendenza e (b) un confronto tra larghezza del blocco e larghezza del robot.
“La stampa 3D cooperativa risolve la scalabilità fisica con la premessa che più stampanti 3D indipendenti possono essere utilizzate per produrre un singolo oggetto. Queste stampanti devono “collaborare” per produrre oggetti che normalmente supererebbero il limite di dimensioni di una stampante 3D tradizionale. Devono avere la libertà di navigare in una vasta area, in modo tale che il loro raggio di stampa sia limitato solo dalla dimensione della superficie di stampa, al contrario di un intervallo fisso imposto dal meccanismo dell’ugello di estrusione. Per riassumere, supponendo che la superficie di stampa sia facilmente scalabile, anche le potenziali dimensioni di stampa saranno altamente scalabili “, ha scritto la McPherson.
“Questo nuovo meccanismo risolve anche la scalabilità temporale presumendo che le nuove stampanti 3D che entrano nella mischia possano ridurre il tempo di stampa complessivo. Dato che il numero di stampanti è dinamico, possiamo quantificare la scalabilità temporale in funzione dell’efficienza parallela dall’utilizzo di un numero qualsiasi di robot. “
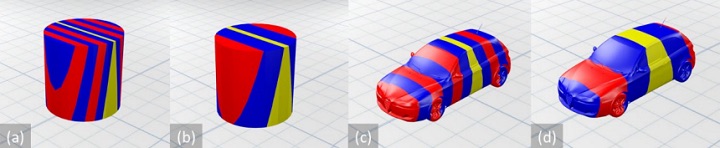
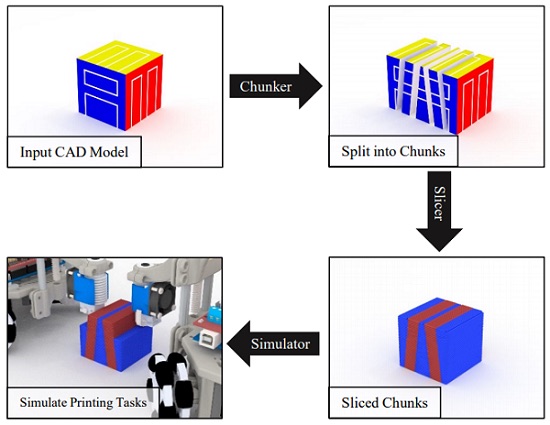
Il design chunker suddivide i modelli 3D in blocchi, che vengono poi suddivisi tra i robot per la stampa 3D. L’slicer converte questi blocchi in comandi di stampa per i robot e il simulatore crea un’immagine visiva, utilizzando i comandi slicer, che mostra come i veri robot avrebbero completato i loro compiti. È importante che il simulatore sia progettato correttamente, poiché è usato per convalidare gli algoritmi chunker e slicer: se il simulatore non è preciso, il resto del processo non lo è neanche.
Nel resto della sua tesi, McPherson descrive come l’affettatrice consente di suddividere i modelli in modo che i pezzi possano essere stampati in 3D in parallelo, oltre a dimostrare come ridimensionare l’affettatrice per più di due robot per ottenere ulteriori gradi di libertà spaziale.
“I risultati mostrano che lo slicer e il simulatore sviluppati funzionano in modo efficace”, ha scritto la McPherson.
La McPherson spera che questo progetto possa aiutare a “gettare le basi per una stampa 3D cooperativa scalabile”, che potrebbe aprire una nuova direzione di ricerca per ridimensionare la stampa 3D e potenzialmente persino “rivoluzionare il modo in cui sono strutturati i processi di produzione”.
“Questa tesi ha presentato, in dettaglio, un processo fattibile per la gestione di ?? robot di stampa 3D che operano in parallelo su un singolo lavoro di stampa, tenendo conto dei vincoli geometrici, dei requisiti di comunicazione tra robot e della necessaria pre-elaborazione necessaria per suddividere adeguatamente un modello per la stampa a blocchi “, ha concluso McPherson.