Il nuovo robot Soft Continuum 3D può sollevare 3 libbre
Di solito quando pensiamo ai robot nella vita di tutti i giorni, è qualcosa di antropomorfico, forse un incrocio tra C-3PO e Rosie, la cameriera robotica di The Jetsons .
Ma i robot non rappresentano sempre la forma umana, e alcuni tipi non sono mai raffigurati nella cultura pop. Prendi robot continui, che hanno trovato lavoro nell’industria aerospaziale, nella chirurgia robotica e nello smaltimento di bombe. Chiamati anche robot a braccio di serpente, queste macchine sottili possono piegarsi in curve morbide con tutti o quasi i loro corpi.
Questi bracci di polpo sono solitamente mobilizzati da cavi che generano forza dalla base dell’arto che viene poi trasferita a diversi punti di attacco in tutto il braccio. Ciò conferisce al robot la mobilità e la coppia necessaria per muoversi e ruotare. Tutto ciò è alimentato da attuatori elettrici, che offrono anche un alto grado di controllo.
Una sfida con questi snakebot è che alcuni modelli (come quelli con gli attuatori situati nella sezione curva) offrono flessibilità e torsione a scapito della forza e della velocità. Questa mancanza di rigidità è uno dei principali limiti nello sviluppo di bracci di sollevamento robotici più robusti e robusti.

Le soluzioni a questo problema utilizzando l’ingegneria di precisione sono costose, una squadra di ricercatori dell’Università di Leeds spera di mitigare con la stampa 3D.
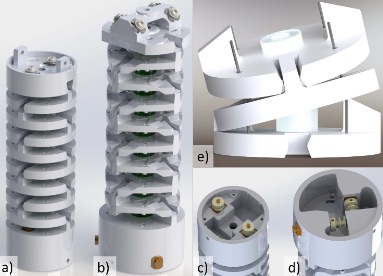
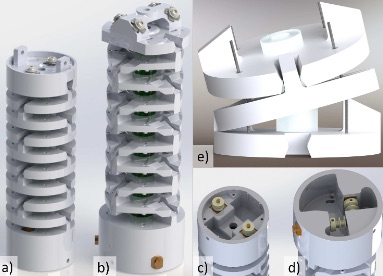
In uno studio recente , l’obiettivo dei ricercatori era quello di creare un segmento di robot continuum stampato in 3D con un’ampia utilità. Per dare una maggiore rigidità torsionale, hanno optato per l’uso di segmenti di “vertebre” equidistanti lungo una dorsale flessibile continua (come in un robot a serpentina standard). Questi segmenti aiutano a guidare quattro tendini che muovono il braccio, ma possono anche interagire tra loro per generare rigidità.
Grazie alla stampa 3D, le iterazioni su diverse versioni di design potrebbero essere stampate rapidamente. I segmenti che ospitano ciascun segmento di vertebre sono stampati preassemblati con una stampante multi-materiale Stratasys Objet1000 . Il materiale Tango + comprendeva la dorsale morbida e flessibile e il materiale Vero più rigido costituito dalle vertebre stesse. Per contenere effettivamente le cose, il design aveva un alesaggio centralizzato che forniva l’aspirazione.
Una prova di forza
Il team ha optato per due progetti da testare per misurare le capacità di sollevamento.
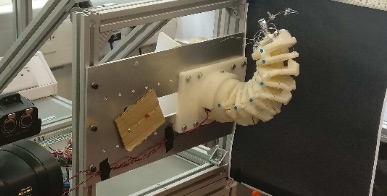
Per testare i singoli segmenti delle braccia, ciascuno è stato montato orizzontalmente su tale rig. I test sono partiti da due distinte posizioni di partenza: una completamente verticale, che ha attivato uno dei motori del braccio; e un altro ruotato di 45 gradi verticalmente che ha attivato entrambi i motori. Il test è iniziato dal limite di movimento più basso del segmento, con il peso sollevato verticalmente più in alto possibile.
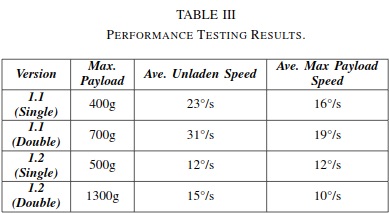
Al suo meglio, il progetto V 1.2 della squadra che impegnava entrambi i motori era in grado di trasportare un carico utile massimo di 1300 g (1,3 kg / 2,86 libbre). Per questa configurazione, la velocità media al carico utile massimo era di 10 gradi al secondo. Anche le prestazioni del design delle vertebre interbloccate erano incoraggianti in quanto prevedibilmente sotto carico.
Risultati del test di sollevamento torsionale su quattro diverse configurazioni di segmenti
Mentre 1,3 kg potrebbero sembrare una quantità irrisoria rispetto a quello che possono fare i robot industriali convenzionali, questo potrebbe essere il primo passo verso la sostituzione di quelli con stampa 3D tecnicamente superiori.
Per arrivare a quel punto, il team di Leeds sta cercando di collegare questi segmenti individuali in un braccio di lavoro ancora più capace. Non si sa quando potranno testare un movimento “spolverare i mobili”.