RICERCATORI CINESI USANO LA STAMPA 3D PER REINVENTARE LA RUOTA PER LA ROBOTICA SAR
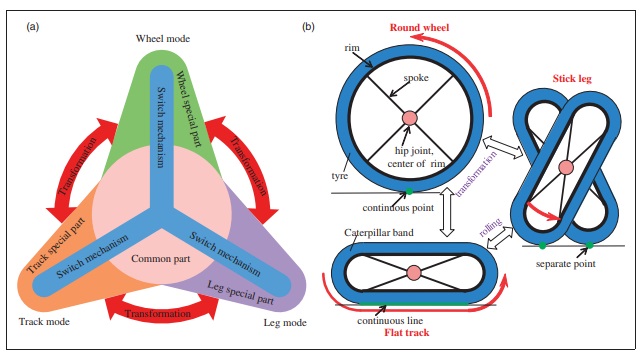
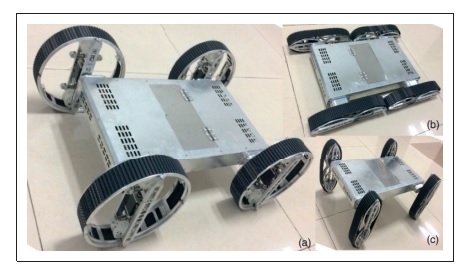
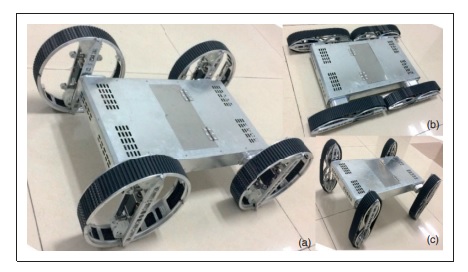
Nel tentativo di rendere questi robot più adattabili al terreno, il team NUDT ha sviluppato un sistema ibrido a ruote motrici compatto basato su un nuovo meccanismo trasformabile. Questo dispositivo integrato consente il passaggio da una ruota a una pista o una gamba, per il trasporto multimodale.
Il documento di ricerca, pubblicato sul Journal of Mechanical Engineering Science , spiega: “L’uso di robot per sostituire gli umani porta molti benefici, che possono non solo ridurre le ferite e la morte ma anche risparmiare tempo prezioso.”
“LAVORANDO IN CAMPI NON STRUTTURATI E IMPREVEDIBILI, I ROBOT DOVREBBERO AVERE UN’ALTA VELOCITÀ E UN’ECCELLENTE ADATTABILITÀ DEL TERRENO. [TUTTAVIA], I ROBOT MOBILI TRADIZIONALI CON MECCANISMO DI MOVIMENTO SINGOLARE NON POSSONO SODDISFARE I REQUISITI SOPRA INDICATI. “
Secondo la ricerca NUDT, i robot che utilizzano ruote, piste o gambe hanno ciascuno i propri vantaggi e svantaggi. I robot delle ruote, ad esempio, sono in grado di correre in modo rapido ed efficiente anche su strade, tuttavia sono limitati dalla capacità di arrampicata. Viceversa, si dice che i robot di traccia siano adattabili ai terreni morbidi e bagnati, ma la velocità e l’efficienza sono basse. E i robot per le gambe possono affrontare diversi ostacoli, ma sono complessi nel design e nel controllo.
Combinando tutti e tre i progetti, il team NUDT ha cercato di sfruttare i vantaggi di ciascuno dei metodi di trasporto per l’adattabilità del terreno ottimale. Nel realizzare questo concetto, il team ha utilizzato la stampa 3D per creare prototipi di ruote che utilizzavano un meccanismo di transizione.
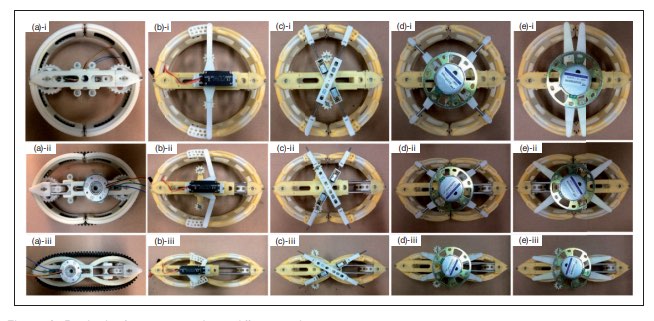
Le ruote sono state quindi create utilizzando metodi convenzionali utilizzando una struttura del cerchio pieghevole composta da quattro cerchi ad arco identici. All’interno dell’intero robot ibrido, un motore guida la trasformazione del cerchio pieghevole, mentre altri due motori guidano la locomozione della ruota trasformabile.
Prima di sistemarsi sui cerchi ad arco per il telaio delle ruote trasformabili, vari raggi sono stati stampati in 3D usando FFF per sperimentare il design dei raggi. Durante questa fase sono stati proposti i raggi telescopici, un progetto usato in precedenza dai ricercatori della Carnegie Mellon University per altri romanzi robot SAR .
Testando i prototipi, i ricercatori di NUDT hanno scoperto che il suo robot poteva cambiare la modalità di locomozione in tempo reale mentre si muoveva, mostrando “eccellente adattabilità del terreno e flessibilità nel terreno imprevedibile”.
Attualmente, il team sta sviluppando l’algoritmo di controllo e le strategie di movimento per adattarsi ai terreni variabili del robot.
“Il design del meccanismo di transizione di una ruota ibrida basata su cerchioni ripiegabili ” è stato scritto congiuntamente da Faliang Zhou, Xiaojun Xu, Haijun Xu, Teng’an Zou e Lei Zhang.