Attuatori morbidi per bioprinting 3D: ottimizzazione di più materiali e topologia
Nella recente pubblicazione ” Effetti dell’ottimizzazione della topologia nella bioprinting multimateriale 3D di attuatori morbidi “, i ricercatori internazionali approfondiscono ulteriormente la fabbricazione della robotica leggera, confinando con la 4D mentre cercano modi per sviluppare polimeri migliorati in grado di rispondere agli stimoli esterni.
La stampa 3D e la robotica sono partner comuni in questi giorni, sia che i ricercatori stiano perfezionando strumenti come pinze , sviluppando nuovi framework o creando robotica ultra programmabile . Gli autori sottolineano che la produzione di robotica è più facile grazie alla fabbricazione digitale, e soprattutto perché le parti possono essere create in un unico pezzo senza richiedere un arduo assemblaggio in seguito. I ricercatori stanno inoltre iniziando a fare più affidamento sulla stampa 4D di materiali che possono deformarsi e poi tornare alla loro forma iniziale:
“La recente proliferazione di robot morbidi stampati in quattro dimensioni deriva da entrambi gli sviluppi nella produzione additiva e dalla ricerca di materiali reattivi”.
In questo studio, gli autori si sono concentrati sulle prestazioni di attuazione, impiegando l’analisi degli elementi finiti (FEA) e l’ottimizzazione della topologia (TO) per una migliore progettazione da trasferire anche ad altri sistemi robotici morbidi.
“La modellazione TO per l’attuatore soft si basava sull’approccio SIMP [materiale solido isotropico con penalizzazione] e l’obiettivo di progettazione era impostato su energia di deformazione minima o rigidità massima con una configurazione strutturale ottimale. Per controllare la rigidità dell’attuatore e la convergenza dell’ottimizzazione, è stato fissato un vincolo di volume “, hanno affermato i ricercatori.
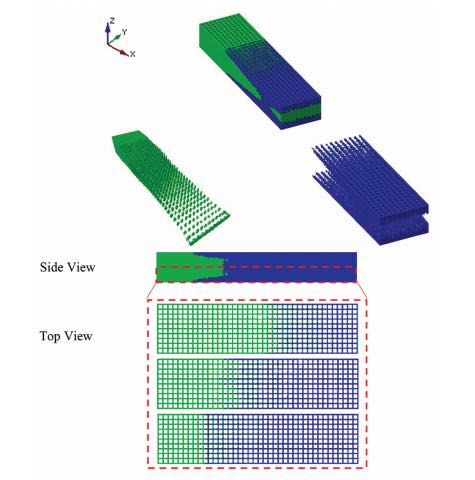
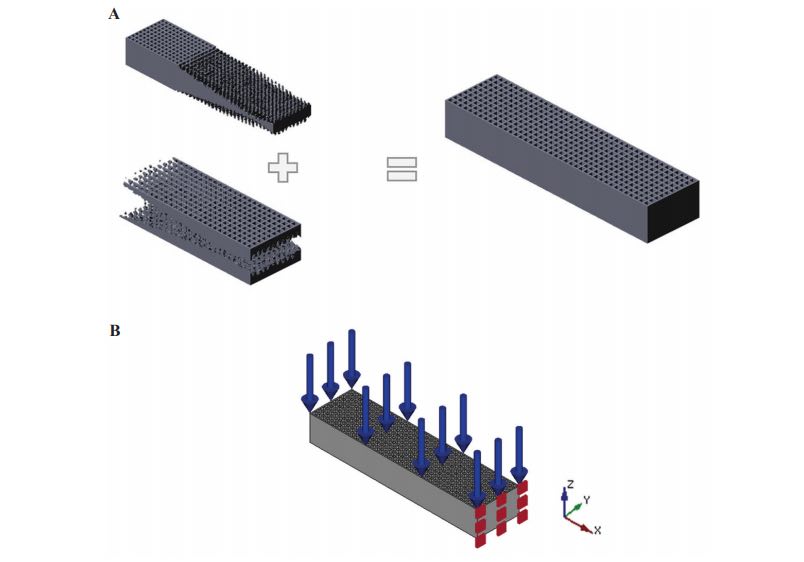
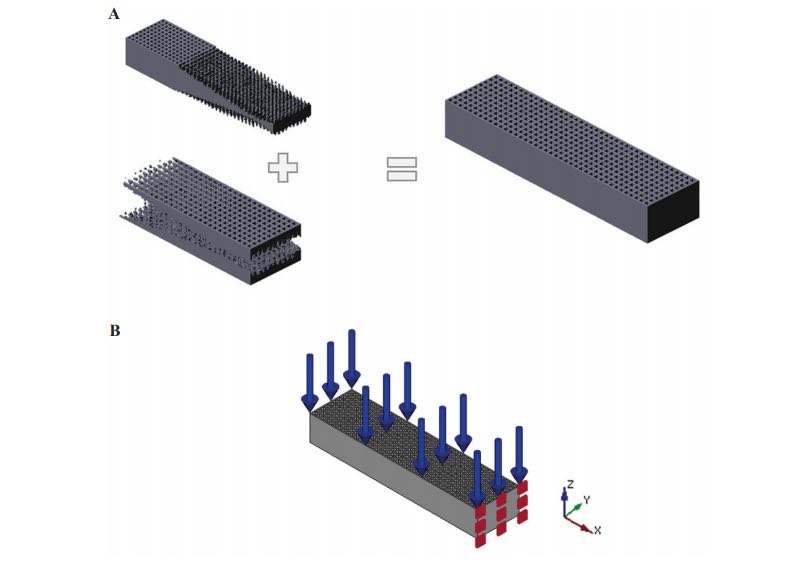
Il team ha utilizzato due materiali per fabbricare il reticolo ottimizzato, creando confini basati su una trave a sbalzo con forza distribuita.
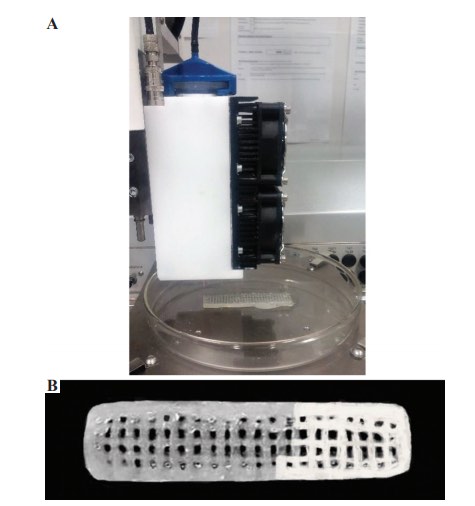
Mentre sono state esplorate numerose altre tecniche relative agli idrogel, in questo studio i ricercatori hanno fatto affidamento sul metodo di indurimento liquido per l’idrogel di chitosano. Le paste stampate in 3D variavano in peso molecolare e concentrazioni.
L’efficienza del TO a due materiali è stata mostrata mentre il team di ricerca ha eseguito numerosi esperimenti, scoprendo che l’approccio multi-materiale ha portato a migliori prestazioni di flessione.
“La causa principale della minore ampiezza di flessione nel nostro campione è attribuita alla caratteristica degli attuatori di idrogel di polielettroliti che dipendono fortemente dallo stimolo elettrico e una volta disattivato il segnale di ingresso, c’è un rilassamento della schiena nella flessione”, hanno affermato i ricercatori. La mancanza di fedeltà nella stampa 3D per alcuni sistemi di estrusi può ridurre il miglioramento previsto da TO principalmente a causa del processo a ciclo aperto della stampa 3D. Negli attuali sistemi, non esiste alcun controllo di feedback sui parametri del processo di stampa per compensare le incertezze durante la stampa 3D. La mancanza di un controllo preciso in fattori quali temperatura ambiente, umidità e vibrazioni dello strumento potrebbe portare a una rappresentazione imperfetta del modello TO. Ulteriore,
“I risultati dimostrano l’efficacia del design multimateriale basato su TO per realizzare il pieno potenziale delle prestazioni degli attuatori morbidi bioprinted”, hanno concluso i ricercatori.