GUARDA: ROBOT DI PATTINAGGIO SU GHIACCIO CON STAMPA 3D AL WORLD ECONOMIC FORUM 2019
Al World Economic Forum di quest’anno a Davos, gli ingegneri robotici dell’ETH di Zurigo hanno presentato il loro robot per l’autoapprendimento pattinatore di ghiaccio, battezzato Skaterbot.
Esibendo il robot, Stelian Coros, co-creatore di Skaterbot e professore al Computational Robotics Lab, ETH Zurich ha dichiarato: “Immagino un momento in un futuro non troppo lontano in cui sarà facile creare robot in quanto è quello di creare strutture al di fuori dei blocchi LEGO. “
Il settore della robotica negli ultimi anni ha ricevuto un aiuto dalla tecnologia di stampa 3D . Grazie alle sue capacità di progettazione e produzione, la tecnologia è anche oggetto di ricerca nel campo della robotica morbida .
Lo stesso professor Coros ha svolto ricerche approfondite in robotica e tecnologia di stampa 3D . Nell’esposizione RETHINKING DESIGN dell’ETH Zurich di recente tenutasi a Davos nell’ambito del World Economic Forum 2019, il professor Coros e il suo team hanno esposto due versioni di Skaterbot, una con le gambe a ruote e l’altra con lame da pattinaggio.
Lo Skaterbot ha avuto origine nello studio chiamato Skaterbots: design basato sull’ottimizzazione e sintesi del movimento per creature robotiche con gambe e ruote che hanno introdotto l’approccio di progettazione computazionale per realizzare robot stampati in 3D.
L’approccio alla progettazione computazionale consente agli utenti di programmare Skaterbot a un livello più alto e quindi il robot regola i suoi movimenti in base ai parametri definiti. Come afferma il documento di ricerca: “i movimenti di volo e di pattinaggio sorgono naturalmente in funzione delle caratteristiche di progettazione dei diversi robot”.
Le istruzioni potrebbero includere il percorso di movimento o la velocità del robot. Una volta impostati questi parametri, Skaterbot elabora i modelli di movimento, come il movimento e la pennellata, per se stesso. In futuro “intendiamo affrontare la generazione di mozioni sempre più agili. Le manovre alla deriva, ad esempio, sfruttano al massimo lo slittamento, che al momento è al di fuori delle capacità del nostro modello “, afferma la carta.
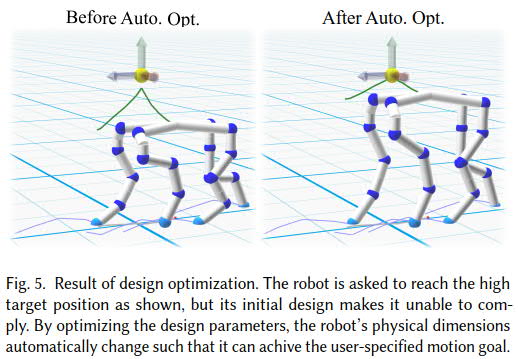
Inoltre, nella fase di progettazione, il robot può essere diretto che dovrebbe raggiungere un certo punto sull’asse z. Se il punto è troppo alto per l’altezza del robot, l’algoritmo di ottimizzazione del progetto computazionale regola le dimensioni del robot.
“ABBIAMO SVILUPPATO UNA SUITE DI STRUMENTI COMPUTAZIONALI GUIDATI DALL’UTENTE CHE SUPPORTANO L’OTTIMIZZAZIONE MANUALE, SEMI-AUTOMATICA E COMPLETAMENTE AUTOMATICA DELLE DIMENSIONI FISICHE DEL ROBOT.”
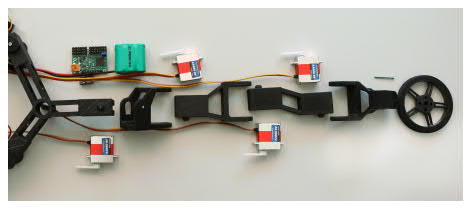
Poiché la capacità di progettazione interattiva può generare varie versioni di Skaterbot, la tecnologia di stampa 3D è perfetta per la sua realizzazione. Gli arti di Skaterbot hanno un design modulare e possono essere stampati in 3D. Per il loro studio, gli ingegneri ETH hanno realizzato gli arti Skaterbot con una stampante 3D Stratasys F370. Altri componenti del robot includevano i servo motori Turnigy TGY-306, un controller USB Pololu Maestro e una batteria da 7,4V.
Valutando gli sforzi della sua squadra alla conferenza di Davos, il professor Coros ha dichiarato: “Considerando che questi sono i nostri primi piccoli passi sul ghiaccio, penso che il nostro robot abbia fatto abbastanza bene.”
Il documento discusso in questo studio è intitolato Skaterbots: design basato sull’ottimizzazione e sintesi del movimento per creature robotiche con gambe e ruote . È stato pubblicato nella rivista ACM Transactions on Graphics ed è stato creato congiuntamente da Moritz Geilinger, Roi Poranne, Ruta Desai, Bernhard Thomaszewski e Stelian Coros.