Con questo progetto, Jeff Kerr ci mostra come realizzare un braccio robotico a sei assi che supporti il movimento coordinato multiasse. Il braccio è una versione in scala del robot industriale UR3 e comprende numerosi componenti complessi.
Hai bisogno di una mano in più per alcuni compiti di assemblaggio leggeri e divertenti in casa? Pensa solo a una versione in scala del robot UR3 con una pinza conforme all’oggetto in questione, ideale per raccogliere tazze dal lavandino o tenere una torcia quando c’è un blackout! .
Un avvertimento: costruire questo braccio non è un compito semplice. Richiede un set di attuatori e una pinza, tutti progetti dettagliati che devono essere stampati e assemblati separatamente. Come tale, potresti avere tutto il tuo weekend occupato se vuoi che questo bambino si animi prima di lunedì.
Rispetto alla maggior parte dei nostri altri progetti del weekend, anche questo è un po ‘più costoso, che costa tra $ 300 e $ 400. Detto questo, non è necessario preoccuparsi della funzionalità, con l’utente Jeff e YouTube John Lauer che ha dimostrato il suo utilizzo.
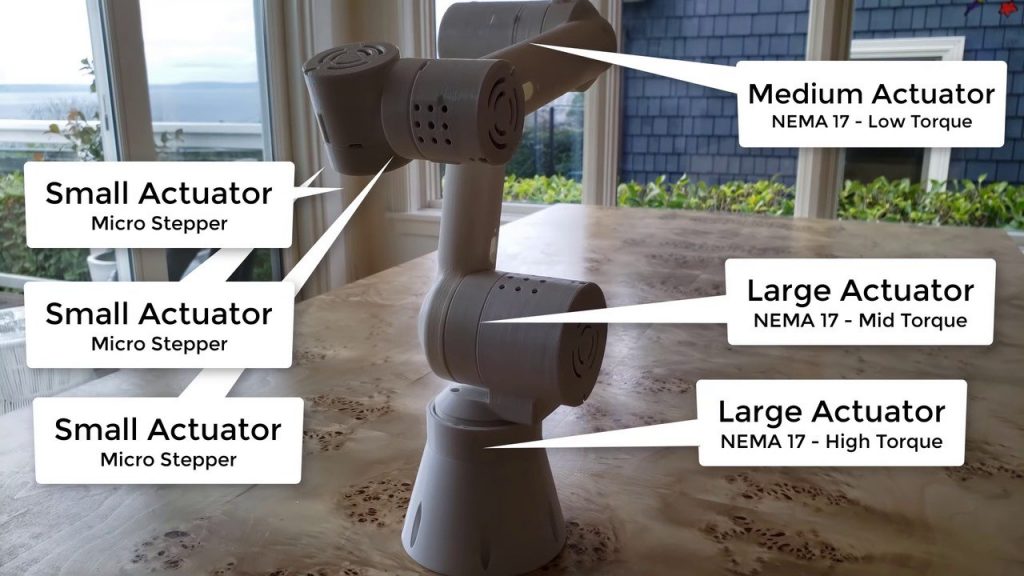
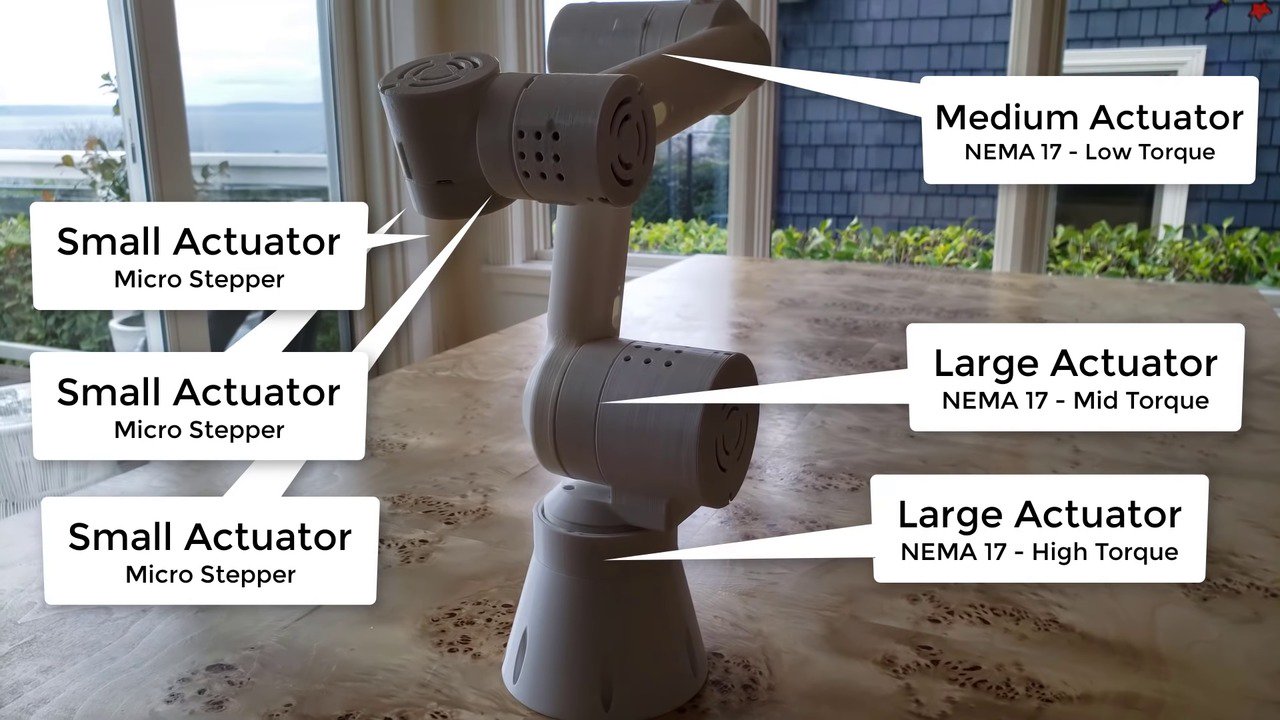
Quando tutto è detto e fatto, dovresti ritrovarti con un analogo robotico di un braccio umano (kinda), a partire dall’articolazione della spalla fino alla punta delle dita. In altre parole, ci sono tre articolazioni principali – spalla, gomito e polso – e il movimento di queste articolazioni sarà aiutato da attuatori che eseguono il codice per l’accelerazione e la decelerazione. Gli attuatori, i cui componenti principali sono microcontrollori e motori passo-passo, saranno alloggiati all’interno di gusci stampati in 3D.
Naturalmente, c’è anche una pinza, che funzionerà un po ‘come due dita umane. Un motore aiuta nel suo movimento.
Nota: gli attuatori e le pinze esistono separatamente come progetti indipendenti.
Gli attuatori sono una parte cruciale di questo progetto e Jeff ha utilizzato una pagina Thingiverse separata per fornire tutti i dettagli dalla stampa all’assemblaggio.
In generale, un attuatore è un componente che converte energia in movimento. Puoi pensare ad esso come l’opposto di un sensore, prendendo segnali elettrici come input e producendo movimento nel mondo fisico. Gli esempi includono valvole elettriche, morsetti e motori.
Nel contesto di questo progetto, il termine “attuatore” viene utilizzato per descrivere non solo il relativo motore passo-passo, ma anche l’assemblaggio circostante.
Specifiche dell’attuatore
Gli attuatori per questo progetto sono costituiti da tre riduttori epicicloidali, ciascuno dei quali utilizza ingranaggi planetari composti 38.4: 1.
Cosa significa? Bene, per prima cosa dovresti sapere che un sistema di ingranaggi planetari è quello in cui i centri di una o più marce (i “pianeti”) ruotano attorno al centro di un’altra marcia (il “sole”). In secondo luogo, il rapporto si riferisce alla differenza di denti degli ingranaggi di collegamento.
I tre attuatori utilizzano motori passo-passo NEMA 17 e di dimensioni variabili in base ai giunti che controllano. Il video YouTube di John mostra come assemblare gli attuatori, che è particolarmente utile poiché sono la parte più dettagliata della build.
gripper
Il braccio del robot deve essere dotato di una pinza del robot conforme. Come per gli attuatori, Jeff include tutte le informazioni rilevanti (requisiti, stampa e assemblaggio) in una pagina Thingiverse separata .
Le punte delle dita girevoli della pinza devono essere conformi alla maggior parte degli oggetti per fornire una presa più salda. Ogni “dito” è un ingranaggio rotante bloccato tra due rack, come Jeff ha preferito questo su perni fissi.
BRACCIO ROBOT A SEI ASSI
Cosa ti serve
Gli attuatori, le BB e le schede controller.
Per i requisiti, supponiamo che tu stia iniziando il progetto da zero, il che significa che devi realizzare gli attuatori e la pinza.
Componenti principali:
Riduttore epicicloidale per rotazione base
Motore passo-passo NEMA 17 (59 N⋅cm) per la spalla
Motore passo-passo NEMA 17 (40 N⋅cm) per il gomito
4 Motore passo-passo NEMA 17 (13 N⋅cm) per il polso e la pinza
Si prega di notare che questi sono i motori consigliati, ma siete liberi di cercare altri equivalenti.
7 Controllori / FBA per motori passo-passo
Cavo Twisted Pair (24 AWG)
Perni a crimpare femmina
3/32 “guaina termorestringente (100 piedi)
BBs Airsoft da 6 mm
Du-Bro 362 6-32 Tap
Du-Bro 361 4-40 Tap
Nastro di montaggio su due lati
Jeff ha utilizzato il suo firmware personalizzato per supportare il movimento coordinato e ha condiviso tutti i dettagli – codice sorgente, documenti e programmazione – su Google Drive .
Viti e dadi (numerazione approssimativa):
30 Vite a testa con cava in zama 6-32 x 3/8 “
20 6-32 dadi
30 Viti a testa cilindrica con testa a bottone 2-56 x 1/8 “
Vite a esagono incassato in acciaio legato duro da 4-40 x 3/8 “
20 4-40 dadi
20 Vite a testa piatta 4-40 x 1/4 “
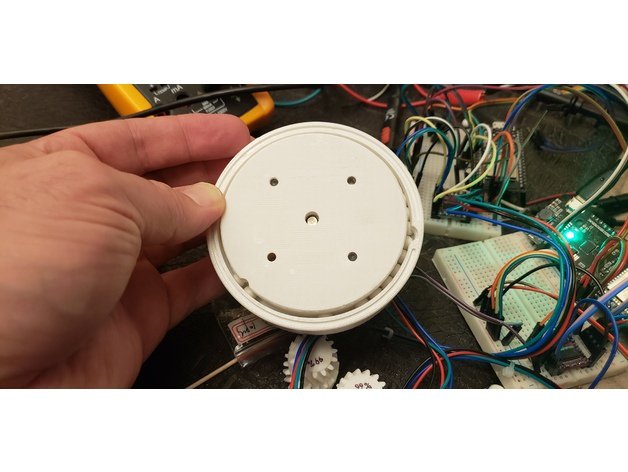
Stampa
BRACCIO ROBOT A SEI ASSI
Parti attuatore stampate in 3D.
Secondo Jeff, le parti strutturali del braccio dovrebbero stampare facilmente senza bisogno di supporto. Lui, personalmente, ha utilizzato una stampante 3D MakerGear M2 e un PLA con le seguenti impostazioni:
Risoluzione: 0,2 mm
Riempimento: 25%
Zattere: no
Supporti: no
John ha una visione unica sulla stampa di ingranaggi. Ha stampato con successo gli ingranaggi planetari – utilizzando il PLA di AmazonBasics – senza la necessità di levigatura. Ha usato un Ender 3 e le sue impostazioni erano le seguenti:
Risoluzione: 0,1 mm
Zattere: sì
Temperatura dell’ugello: 235 ° C
Temperatura del letto: 65 ° C
Egli sostiene che finirai con un fondo “molliccio” se non usi la zattera, ed è un dolore archiviare la parte. Ha anche accennato al fatto che non ha usato l’angolo più acuto predefinito di Cura, ma ha invece randomizzato l ‘”allineamento della cucitura Z” per ottenere le parti il più agevole possibile.
Attuatore e braccio del
BRACCIO ROBOT A SEI ASSI
L’articolazione del gomito assemblata.
Generalmente, gli attuatori avranno bisogno di una levigatura e di un’archiviazione appropriate prima di poterli rompere. Secondo John, un lubrificante (come il grasso lubrificante al silicone) farà molto per assicurarsi che gli attuatori funzionino senza intoppi.
Fare riferimento alla pagina Thingiverse per il set completo di istruzioni .
Braccio
Prima di iniziare il montaggio e il cablaggio del braccio, disporre tutti i controller e i motori su un tavolo ed eseguire alcuni test per verificare che tutto funzioni correttamente.
Ancora una volta, Jeff ha dettagliato il processo di assemblaggio del braccio su Thingiverse.
Avrai tre articolazioni principali di cui preoccuparti: l’articolazione del cono di base, l’articolazione della spalla e l’articolazione del gomito. Una volta completati tutti i rispettivi attuatori, puoi preoccuparti dei polsi.
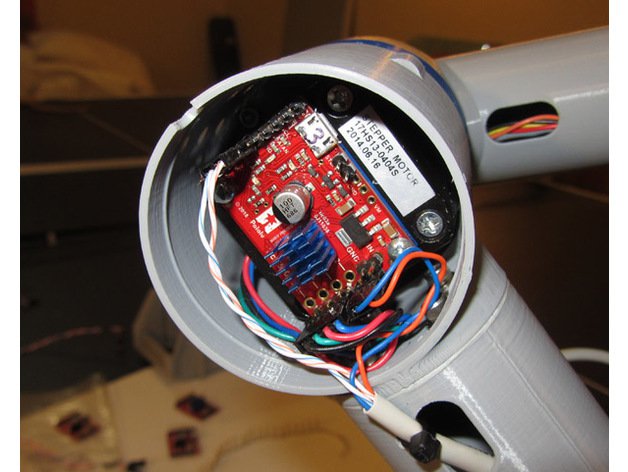
Cablaggio
BRACCIO ROBOT A SEI ASSI
Dentro il gomito.
Jeff ammette che il cablaggio può essere un po ‘frenetico, principalmente perché gli attuatori non hanno un buco al centro come le loro controparti UR3. Pertanto, sarà necessario determinare il modo in cui i cavi correranno su ciascuna articolazione pur avendo abbastanza spazio per un facile movimento dei giunti.
Jeff ha utilizzato un bus seriale (V +, GND, TX, RX) con schede controller piccole distribuite su tutto il braccio e ogni motore aveva la propria scheda. Questo ha lo scopo di ridurre il numero di fili in giro.
Un processo di cablaggio più dettagliato è disponibile su Thingiverse.
Software e test
BRACCIO ROBOT A SEI ASSI
Test di un attuatore.
Test di un attuatore. Fonte: jlauer / Thingiverse
Come accennato in precedenza, Jeff ha fornito documentazione sul firmware modificato utilizzato per le schede T500. La stessa directory contiene un programma di test di Windows e un codice sorgente C ++ per il programma di test.
Jeff riconosce che la parte più difficile è far lampeggiare il suo firmware modificato sulla scheda. Potrebbe essere necessario contattare i produttori (delle vostre schede) per chiedere se possono vendere la loro scheda pre-lampo.
Altrimenti, Microchip offre un video che potrebbe aiutarti a ridisporre le schede T500 , ma dovrai comunque fare riferimento ai dettagli di modifica del firmware di Jeff per confermare come collegare ciascun pin.
Il firmware della scheda T500 standard non è in grado di gestire i movimenti multiasse richiesti dal braccio, e questo è ciò che ha spinto Jeff a scrivere da solo. Se vuoi la sincronizzazione corretta e il movimento coordinato, non avrai altra scelta se non programmare il firmware di Jeff nelle schede controller. Se lo desideri, puoi comunque utilizzare il firmware standard, ma non otterrai la migliore sincronizzazione da tutti i giunti.
Il braccio di John era un po ‘diverso:
Ha usato ESP32 per eseguire il NodeMCU per creare segnali di gradini e ha aggiunto pulsanti per avviare e arrestare i motori.
Inoltre ha aggiunto le direzioni inverse per rendere più facile la rottura e il test. Ha usato un chip DRV8825 (sebbene stia considerando un driver DRV8824 perché i driver DRV8825 stavano rilasciando corrente in eccesso nel piccolo motore) per guidare i motori e il ChiliPeppr ESP32 per l’area di lavoro Lua per scrivere il codice.