Ricercatori statunitensi approfondiscono ulteriormente la robotica leggera, delineando le loro scoperte negli ” Attuatori somatosensibili morbidi recentemente pubblicati tramite la stampa 3D incorporata “. Sviluppando un nuovo metodo basato su attuatori somatosensibili morbidi (SSA) incorporati in strutture stampate in 3D, i ricercatori si concentrano su un modo efficace di combinare caratteristiche conduttive con matrici elastomeriche.
Oggi, la stampa 3D, la robotica leggera e i sensori sembrano spesso accompagnarsi l’un l’altro e, in questo studio, gli scienziati hanno combinato tre SSA all’interno di una pinza, consentendo loro di mostrare un feedback propriocettivo e tattile tramite funzionalità incorporate come curvatura, inflazione e contatto sensori.
“Sfruttando la conduttività ionica dipendente dalla temperatura dei sensori di contatto degli SSA insieme al nostro processo di fabbricazione in forma libera, abbiamo anche creato SSA con rilevamento di contatto a contatto con temperatura e profondità, rispettivamente, che non sono stati ancora realizzati da altri attuatori robotici “, hanno affermato i ricercatori.
Gli inchiostri conduttivi sono stampati in tre matrici:
Dorsale
attuatore
Matrice anteriore
Con questi materiali caricati, i ricercatori hanno potuto stampare quanto segue:
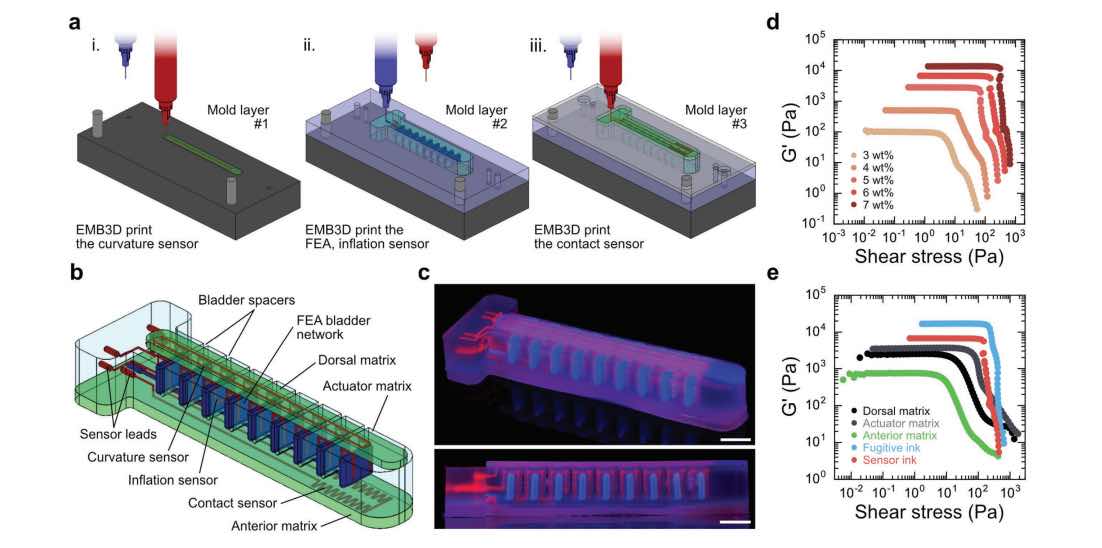
Sensore di curvatura nella matrice dorsale
Caratteristiche FEA (compresi i distanziali dell’attuatore e la rete vescicale) e sensore di gonfiaggio nella matrice dell’attuatore
Sensore di contatto nella matrice anteriore
Al termine della stampa e dell’indurimento, gli SSA vengono rimossi dai loro stampi. Da lì, ‘l’inchiostro fuggitivo viene evacuato’, lasciando dietro di sé canali vuoti per i cavi elettrici da inserire. Il successo si basa su ciascuna matrice elastomerica che dimostra adeguate proprietà reologiche. Gli SSA devono essere in grado di piegarsi correttamente, con tutti i sensori in grado di deformarsi e aumentare di fronte alla resistenza.
Composto da un liquido ionico organico (1-etil-3-metilimidazolio etil solfato (EMIM-ES) riempito con particelle di silice fumata), l’inchiostro del sensore utilizzato in questo studio è un modificatore di reologia, offrendo i seguenti vantaggi:
Bassa pressione di vapore
Non impermeabilità attraverso matrici elastomeriche
Resistività adatta per applicazioni di rilevamento
“Ogni sensore è costituito da un estensimetro resistivo la cui resistenza elettrica è data da R = ρL / A, dove ρ è la resistività, L è la lunghezza e A è l’area della sezione trasversale delle caratteristiche stampate dello ionogel”, hanno spiegato i ricercatori . “La variazione di resistenza, ΔR, durante il funzionamento è data da ΔR = R – R0, dove R0 è la resistenza iniziale.”
Dato che le tre SSA sono state combinate nella creazione della pinza robotizzata morbida per questo studio, i ricercatori hanno notato che quando il dispositivo veniva utilizzato per raggiungere varie sfere, ciascuna SSA si gonfiava e tutte in modo identico, con feedback sensoriale ricevuto dal centro SSA.
“Osserviamo chiaramente la natura cinestetica del sensore di gonfiaggio rimuovendo la sfera dalla pinza gonfiata, poiché l’inflazione Δ rimane in qualche modo costante. R per tutti i sensori è tornato a ≈R0 una volta sgonfiati gli SSA “, hanno spiegato i ricercatori.
Sperimentando la temperatura, hanno notato quanto segue:
“Quando si afferra la sfera RT a 165 kPa, ΔRcontact è ≈9 kΩ maggiore di quello per quando la pinza non trattiene nulla a 165 kPa. Quando si afferra la palla calda, ΔRcontact diminuisce sensibilmente, anche diventando negativo, a causa dell’aumento locale della conduttività del sensore di contatto dove il meandro distale entra in contatto con la palla. Infine, quando si prende la palla fredda, si osserva un netto aumento di ΔRcontact che supera il valore di ΔRcontact per la stessa palla tenuta a RT. Quando la pinza rilascia le sfere calde e fredde, ΔRcontact non ritorna immediatamente al valore di 0 kΩ misurato a RT. ”
Alla fine, il team si è reso conto che per questo campione, le SSA non erano in grado di gestire la pressione e la temperatura di contatto degli oggetti in modo “semplice”, portandoli a notare che in futuro avrebbero dovuto creare sensori aggiuntivi con materiali diversi, oppure incorporare metodi di apprendimento automatico.
Hanno anche creato sensori di contatto fini e profondi, costituiti da diversi campi ricettivi, come le dita. Durante la sperimentazione, il team di ricerca ha organizzato la presa di una palla di schiuma morbida durante tre diversi livelli di gonfiaggio.
“Per ogni pressione di gonfiaggio, ΔRfine è negativo o ≈0 kΩ quando la pinza non afferra nulla e aumenta notevolmente quando si afferra la palla. Il sensore di contatto profondo è meno sensibile, ma ΔRdeep è ancora maggiore di ,8, 10 e 12 kΩ quando si afferra la palla su P1, P2 e P3, rispettivamente, rispetto a quando non si afferra nulla “, hanno affermato i ricercatori.
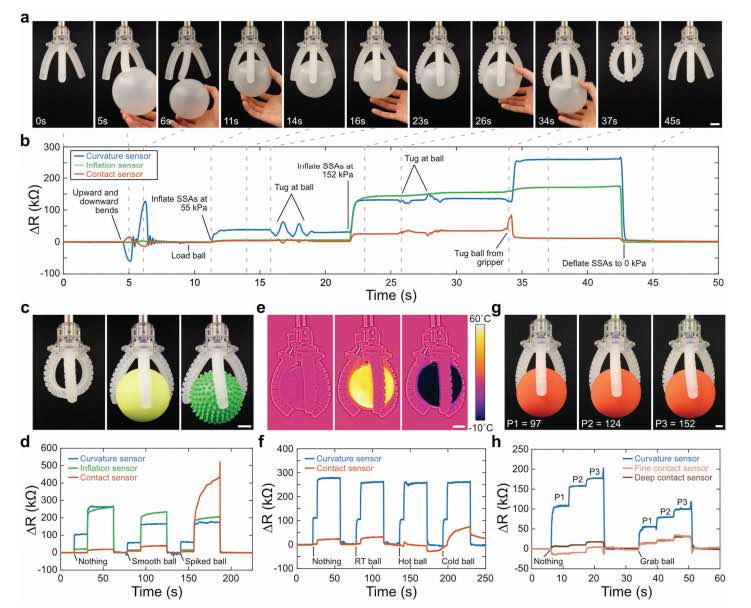
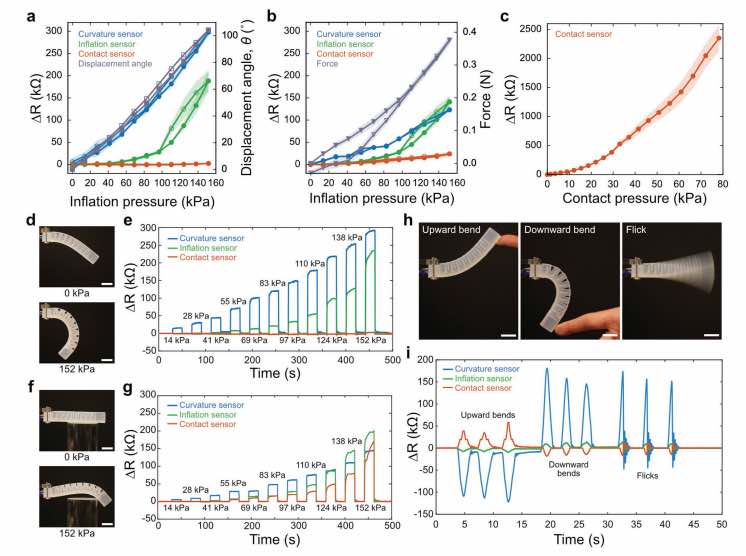
Pinze robotiche morbide con feedback somatosensoriale. a) Immagini di una sequenza di interazione tra una palla e una pinza robotizzata leggera composta da SSA (vedere il film S5 nelle Informazioni di supporto; la barra della scala è di 20 mm). b) ΔR di ciascun sensore in funzione del tempo durante la sequenza di interazione indicata in (a). (Nota: la pinza non gonfiata (t = 0 s) aveva una SSA piegata verso l’alto (t = 5 s) e verso il basso (t = 6 s) prima che la palla fosse inserita nella pinza. La pinza viene quindi gonfiata a 55 kPa (t = 11 s) per trattenere la palla (t = 14 s) anche se tirato manualmente (t = 16 s). La pressione di gonfiaggio viene aumentata a 152 kPa per una presa più forte (t = 23 s). Dopo un ulteriore tiro (t = 26s), la sfera viene rimossa dalla pinza (t = 34 s), che rimane gonfiata a 152 kPa (t = 37 s). La pinza viene sgonfiata a t ≈ 43 s. ) c) Le immagini fisse mostrano la pinza che non tiene nulla (a sinistra), una palla liscia (al centro) e una palla a spillo (a destra) (vedere il film S6 nelle Informazioni di supporto; la barra della scala è di 20 mm). d) ΔR per ciascun sensore è rappresentato in funzione del tempo. e) Immagini termiche di una pinza che tiene una palla a temperatura ambiente (RT), una palla calda (≈60 ° C) e una palla fredda (≈0 ° C) (vedere Film S7 nelle Informazioni di supporto; la barra della scala è 20 mm ). f) ΔRcurvature e ΔRcontact tracciati in funzione del tempo. g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). e una palla a spillo (a destra) (vedere il film S6 nelle Informazioni di supporto; la barra della scala è di 20 mm). d) ΔR per ciascun sensore è rappresentato in funzione del tempo. e) Immagini termiche di una pinza che tiene una palla a temperatura ambiente (RT), una palla calda (≈60 ° C) e una palla fredda (≈0 ° C) (vedere Film S7 nelle Informazioni di supporto; la barra della scala è 20 mm ). f) ΔRcurvature e ΔRcontact tracciati in funzione del tempo. g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). e una palla a spillo (a destra) (vedere il film S6 nelle Informazioni di supporto; la barra della scala è di 20 mm). d) ΔR per ciascun sensore è rappresentato in funzione del tempo. e) Immagini termiche di una pinza che tiene una palla a temperatura ambiente (RT), una palla calda (≈60 ° C) e una palla fredda (≈0 ° C) (vedere Film S7 nelle Informazioni di supporto; la barra della scala è 20 mm ). f) ΔRcurvature e ΔRcontact tracciati in funzione del tempo. g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). e) Immagini termiche di una pinza che tiene una palla a temperatura ambiente (RT), una palla calda (≈60 ° C) e una palla fredda (≈0 ° C) (vedere Film S7 nelle Informazioni di supporto; la barra della scala è 20 mm ). f) ΔRcurvature e ΔRcontact tracciati in funzione del tempo. g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). e) Immagini termiche di una pinza che tiene una palla a temperatura ambiente (RT), una palla calda (≈60 ° C) e una palla fredda (≈0 ° C) (vedere Film S7 nelle Informazioni di supporto; la barra della scala è 20 mm ). f) ΔRcurvature e ΔRcontact tracciati in funzione del tempo. g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). g) Immagini fisse che mostrano una pinza composta da SSA con sensori a contatto fine e profondo incorporati che tengono una sfera di schiuma a 97 kPa (P1), 124 kPa (P2) e 152 kPa (P3) (vedere il film S9 nelle Informazioni di supporto; scala la barra è di 10 mm). h) La curva ΔRcvv, ΔRfine e ΔRdeep sono tracciati in funzione del tempo per la sequenza mostrata in (g). Prestazioni di attuatori somatosensibili morbidi. a) Variazione della resistenza, ΔR, per i sensori di curvatura, gonfiaggio e contatto e angolo di spostamento, θ, in funzione della pressione di gonfiaggio durante lo spostamento libero. b) ΔR per ciascun sensore e forza generata in funzione della pressione di gonfiaggio durante lo spostamento bloccato. c) ΔRcontattare in funzione della pressione di contatto applicata. Per (a) – (c), i punti dati e le aree ombreggiate rappresentano rispettivamente i valori medi e le deviazioni standard (n = 3). d) Immagini di un SSA a 0 kPa (in alto) e 152 kPa (in basso) durante un test dinamico di spostamento libero, in cui l’SSA subisce periodi di non inflazione (0 kPa per 20 s) per aumentare la pressione di gonfiaggio (trattenuta per 20 s ) con incrementi di 14-152 kPa. e) ΔR di ciascun sensore è rappresentato in funzione del tempo. f) Immagini fisse di un SSA che si gonfia contro un’asta acrilica a 0 kPa (in alto) e 152 kPa (in basso) durante un test di spostamento dinamico bloccato, in cui l’SSA viene azionato tramite la stessa sequenza di gonfiaggio di cui in (d) ed (e ). g) ΔR per ciascun sensore è rappresentato in funzione del tempo. h) Manipolazione verso l’alto (a sinistra), verso il basso (al centro) e stile flick (a destra) eseguita su un SSA non gonfiato. i) ΔR per ciascun sensore viene tracciato in funzione del tempo per un SSA che subisce una sequenza di tre curve verso l’alto, tre curve verso il basso e tre movimenti intermedi. Tutte le barre della scala sono 20 mm. e manipolazioni di tipo flick (a destra) eseguite su un SSA non inflazionato. i) ΔR per ciascun sensore viene tracciato in funzione del tempo per un SSA che subisce una sequenza di tre curve verso l’alto, tre curve verso il basso e tre movimenti intermedi. Tutte le barre della scala sono 20 mm. e manipolazioni di tipo flick (a destra) eseguite su un SSA non inflazionato. i) ΔR per ciascun sensore viene tracciato in funzione del tempo per un SSA che subisce una sequenza di tre curve verso l’alto, tre curve verso il basso e tre movimenti intermedi. Tutte le barre della scala sono 20 mm. 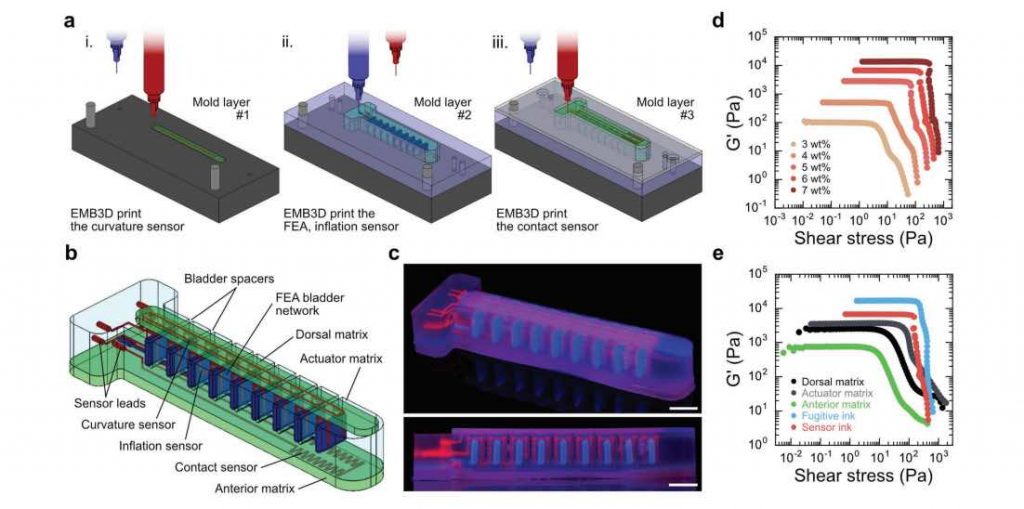
Fabbricazione di attuatori somatosensibili morbidi (SSA) innervati con più sensori morbidi. a) Il sensore di curvatura è stampato all’interno della matrice dorsale (Livello 1); le caratteristiche dell’attuatore e il sensore di gonfiaggio sono stampati all’interno della matrice dell’attuatore (Livello 2); e il sensore di contatto è stampato nella matrice anteriore (strato 3). b) Illustrazioni schematiche e c) immagini dell’SSA finale. Le immagini in (c) sono scattate con esposizione alla luce nera e gli inchiostri fuggitivi (blu) e con sensore (rosso) sono stati tinti in modo fluorescente per facilitare la visualizzazione (le barre di scala sono 10 mm). d) Diagramma log-log del modulo di memoria, G ′, in funzione della sollecitazione a taglio per inchiostri a sensore composto da 1-etil-3-metilimidazolio etil solfato con contenuto di silice fumosa variabile (% in peso).